Provide easy-to-use, extensible software for modeling, simulating, controlling, and analyzing the neuromusculoskeletal system.
-
Sina Porsa
- Posts: 5
- Joined: Sun Jul 15, 2018 4:51 pm
Post
by Sina Porsa » Wed Nov 21, 2018 11:19 pm
Hi everyone.
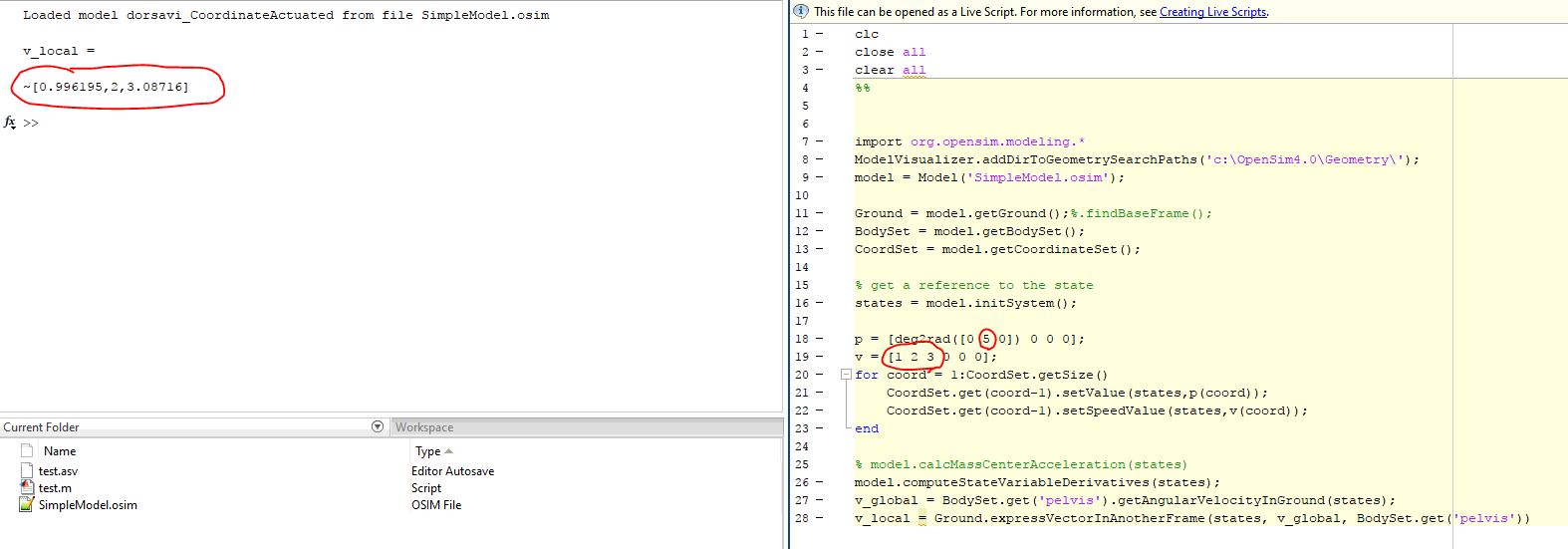
I am trying to solve a problem where I need to calculate Angular velocities in local frames. I just realized that pelvis's orientation can affect it's local angular velocities which does not make sense to me. Please take a look at thesimplified MATLAB script. In this case my model has 1 body only (pelvis) which has 6DOF (3 rotations followed by 3 translations)
Code: Select all
pos = [deg2rad([0 0 0]) 0 0 0];
vel = [1 2 3 0 0 0];
for coord = 1:CoordSet.getSize()
CoordSet.get(coord-1).setValue(states,pos(coord));
CoordSet.get(coord-1).setSpeedValue(states,vel(coord));
end
model.computeStateVariableDerivatives(states);
v_global = BodySet.get('pelvis').getAngularVelocityInGround(states);
v_local = Ground.expressVectorInAnotherFrame(states, v_global, BodySet.get('pelvis'))
I am expecting
v_local to be exactly equal to the first 3 components of
vel array. I just realized v_local is a function of 2nd and 3rd orientations which does not mae sense to me. how come pelvis rotation value can affect pelvis list angular velocity? I dont's think this is a Gimbal lock as even pelvis_list=5 degrees can cause inaccurate results. (see attached jpeg )
file
- Capture.JPG (98.4 KiB) Viewed 729 times
Tags:
-
Renee Degutis
- Posts: 4
- Joined: Tue Nov 20, 2018 5:28 am
Post
by Renee Degutis » Fri Nov 30, 2018 5:28 am
dorsavi wrote: ↑Wed Nov 21, 2018 11:19 pm
Hi everyone.
I am trying to solve a problem where I need to calculate Angular velocities in local frames. I just realized that pelvis's orientation can affect it's local angular velocities. Please take a look at thesimplified MATLAB script. In this case my model has 1 body only (pelvis) which has 6DOF (3 rotations followed by write my essay in 3 hours translations)
Code: Select all
pos = [deg2rad([0 0 0]) 0 0 0];
vel = [1 2 3 0 0 0];
for coord = 1:CoordSet.getSize()
CoordSet.get(coord-1).setValue(states,pos(coord));
CoordSet.get(coord-1).setSpeedValue(states,vel(coord));
end
model.computeStateVariableDerivatives(states);
v_global = BodySet.get('pelvis').getAngularVelocityInGround(states);
v_local = Ground.expressVectorInAnotherFrame(states, v_global, BodySet.get('pelvis'))
fileCapture.JPG
Hello Sina,
I don't think it's due to Gimbal lock either. It does not really lock anything, only for certain operations (from a mathematical point if view).
Regards,
Renee
-
Ton van den Bogert
- Posts: 168
- Joined: Thu Apr 27, 2006 11:37 am
Post
by Ton van den Bogert » Fri Nov 30, 2018 10:03 am
If I understand correctly what you asked Opensim to do, this is as expected. The time derivatives of the three orientation angles are not the same as the cartesian components of the angular velocity vector (in either reference frame).
See, for example,
https://en.wikipedia.org/wiki/Angular_v ... ler_angles
Below is Matlab code to find the relationship between angle derivatives and angular velocity in symbolic form. This is for one particular rotation sequence, but it is easily changed to another sequence. It finds the matrix B such that omega = B*qdot, where qdot are the time derivatives of the orientation angles.
Ton van den Bogert
Code: Select all
syms R Rx Ry Rz
q = sym('q',[3,1], 'real'); % q is a symbolic 3x1 matrix
qdot = sym('qdot',[3,1], 'real'); % another symbolic 3x1 matrix
Rx = [ 1 0 0 ; ...
0 cos(q(1)) -sin(q(1)) ; ...
0 sin(q(1)) cos(q(1)) ]
Ry = [ cos(q(2)) 0 sin(q(2)) ; ...
0 1 0 ; ...
-sin(q(2)) 0 cos(q(2)) ]
Rz = [ cos(q(3)) -sin(q(3)) 0 ; ...
sin(q(3)) cos(q(3)) 0 ; ...
0 0 1 ]
R = Rx * Ry * Rz
% find Rdot using the multivariate chain rule
Rdot = diff(R,q(1)) * qdot(1) + diff(R,q(2)) * qdot(2) + diff(R,q(3)) * qdot(3)
% find omega using R and Rdot
A = R' * Rdot
omega = [-A(2,3) ; A(1,3) ; -A(1,2)]
% omega is linear in qdot, so find the coefficient matrix B
B = jacobian(omega,qdot)
B = simplify(B)