Provide easy-to-use, extensible software for modeling, simulating, controlling, and analyzing the neuromusculoskeletal system.
-
Morteza Khosrotabar
- Posts: 7
- Joined: Thu Jul 25, 2019 6:25 am
Post
by Morteza Khosrotabar » Wed Feb 19, 2020 8:41 am
Hi everyone
I want to run Computed Muscle Control to compute a set of muscle excitations in the Rajagopal2015 full-body model. I use a data-set that has only 22 markers on the lower-body segments. I do Scale and inverse kinematic and RMS and max values are in the allowable regions.
But when I try RRA, It stops

Is it an important issue that my model doesn't have upper-body markers?!
Is it correct if I remove the upper-body segments in Rajagopal's Model?
and my last question

I saw some lower-limb models, and I wonder that the hip-flexor muscles (such as Psoas major) don't attache to any segments! I knew from the anatomy that hip-flexor muscles' origin was on the lumbar, so how these lower-limb models that don't have lumbar produce excitations for those muscles that attach to the lumbar?
I'm sorry. too many questions
Tags:
-
Ayman Habib
- Posts: 2248
- Joined: Fri Apr 01, 2005 12:24 pm
Post
by Ayman Habib » Wed Feb 19, 2020 10:39 am
Hi Morteza,
Generally speaking, markers are in play only to Scale and run IK, from then on, the markers are not used at all and can be totally ignored so if you're having issues with RRA you can safely rule out the markers being the reason.
Depending on your research question it may make sense to remove some segments, or to lump segments together.
Hope this helps,
-Ayman
-
Morteza Khosrotabar
- Posts: 7
- Joined: Thu Jul 25, 2019 6:25 am
Post
by Morteza Khosrotabar » Thu Feb 20, 2020 3:54 am
thank you, Ayman,
last night I changed the optimizer from "ipopt" to "cfsqp" and fortunately RRA algorithm run completely, but I figured out a new problem.
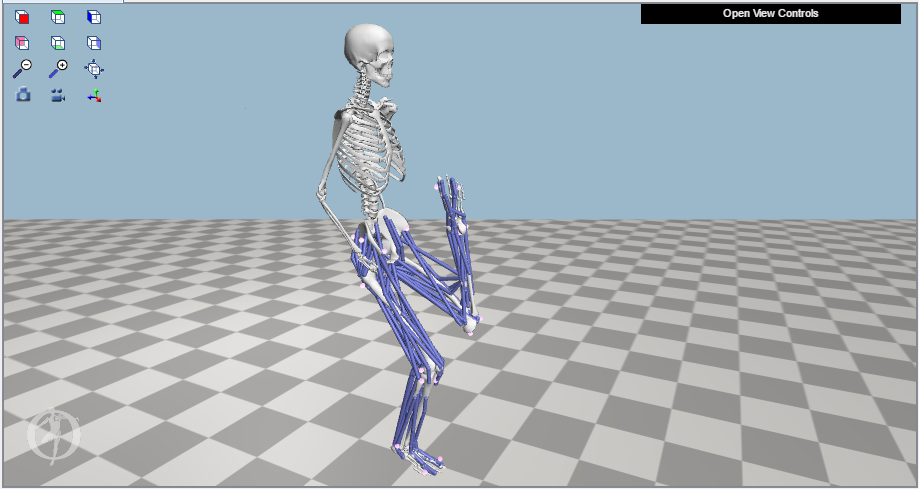
the skeletal model had strange behaviors!
I checked the ground reaction forces and it's "XML" file and compares it with other's templates. I think my "grf" files are good and don't have any problems. I don't know what should I do to fix this problem. for more detail, I post my "grf" code below and what I saw in the visualizer window in GUI.
hope you could help me through this :)
Code: Select all
<?xml version="1.0" encoding="UTF-8" ?>
<OpenSimDocument Version="40000">
<ExternalLoads name="grf_walk">
<objects>
<ExternalForce name="Right_GRF">
<!--Flag indicating whether the force is applied or not. If true the forceis applied to the MultibodySystem otherwise the force is not applied.NOTE: Prior to OpenSim 4.0, this behavior was controlled by the 'isDisabled' property, where 'true' meant that force was not being applied. Thus, if 'isDisabled' is true, then 'appliesForce` is false.-->
<appliesForce>true</appliesForce>
<!--Name of the body the force is applied to.-->
<applied_to_body>calcn_r</applied_to_body>
<!--Name of the body the force is expressed in (default is ground).-->
<force_expressed_in_body>ground</force_expressed_in_body>
<!--Name of the body the point is expressed in (default is ground).-->
<point_expressed_in_body>ground</point_expressed_in_body>
<!--Identifier (string) to locate the force to be applied in the data source.-->
<force_identifier>ground_force_r_v</force_identifier>
<!--Identifier (string) to locate the point to be applied in the data source.-->
<point_identifier>ground_force_r_p</point_identifier>
<!--Identifier (string) to locate the torque to be applied in the data source.-->
<torque_identifier>ground_torque_r_</torque_identifier>
</ExternalForce>
<ExternalForce name="Left_GRF">
<!--Flag indicating whether the force is applied or not. If true the forceis applied to the MultibodySystem otherwise the force is not applied.NOTE: Prior to OpenSim 4.0, this behavior was controlled by the 'isDisabled' property, where 'true' meant that force was not being applied. Thus, if 'isDisabled' is true, then 'appliesForce` is false.-->
<appliesForce>true</appliesForce>
<!--Name of the body the force is applied to.-->
<applied_to_body>calcn_l</applied_to_body>
<!--Name of the body the force is expressed in (default is ground).-->
<force_expressed_in_body>ground</force_expressed_in_body>
<!--Name of the body the point is expressed in (default is ground).-->
<point_expressed_in_body>ground</point_expressed_in_body>
<!--Identifier (string) to locate the force to be applied in the data source.-->
<force_identifier>ground_force_l_v</force_identifier>
<!--Identifier (string) to locate the point to be applied in the data source.-->
<point_identifier>ground_force_l_p</point_identifier>
<!--Identifier (string) to locate the torque to be applied in the data source.-->
<torque_identifier>ground_torque_l_</torque_identifier>
</ExternalForce>
</objects>
<groups />
<!--Storage file (.sto) containing (3) components of force and/or torque and point of application.Note: this file overrides the data source specified by the individual external forces if specified.-->
<datafile>grf_walk.mot</datafile>
<!--The option is deprecated and unnecessary to apply external loads. A motion file (.mot) or storage file (.sto) containing the model kinematics used to transform a point expressed in ground to the body of force application.If the point is not expressed in ground, the point is not transformed-->
<external_loads_model_kinematics_file>E:\+EE_Lab+\_Master Thesis\OpenSim Data\DataSets\MyData\OpenSim_Simulation\_Subject04_opensim_based - method2\IK\results_walk\ik_output_motion.mot</external_loads_model_kinematics_file>
<!--Optional low-pass cut-off frequency for filtering the model kinematics corresponding used to transform the point of application. A negative value results in no filtering. The default value is -1.0, so no filtering.-->
<lowpass_cutoff_frequency_for_load_kinematics>-1</lowpass_cutoff_frequency_for_load_kinematics>
</ExternalLoads>
</OpenSimDocument>
-
Morteza Khosrotabar
- Posts: 7
- Joined: Thu Jul 25, 2019 6:25 am
Post
by Morteza Khosrotabar » Sat Feb 22, 2020 9:08 am
Hi everyone
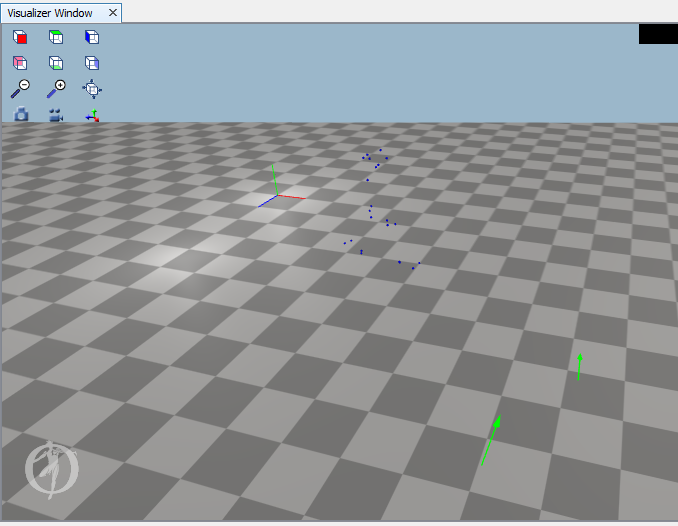
I discovered the cause of this problem. as you can see below the ground reaction forces and markers' coordinates are not synchronized, and this problem leads the RRA toward the unusual response of the skeletal model.
-
hu zhao
- Posts: 4
- Joined: Wed Nov 25, 2020 4:58 am
Post
by hu zhao » Wed Jun 23, 2021 2:01 am
hello,i also have the same problem,so how dou you solve the round reaction forces and markers' coordinates are not synchronized? Thank you very much