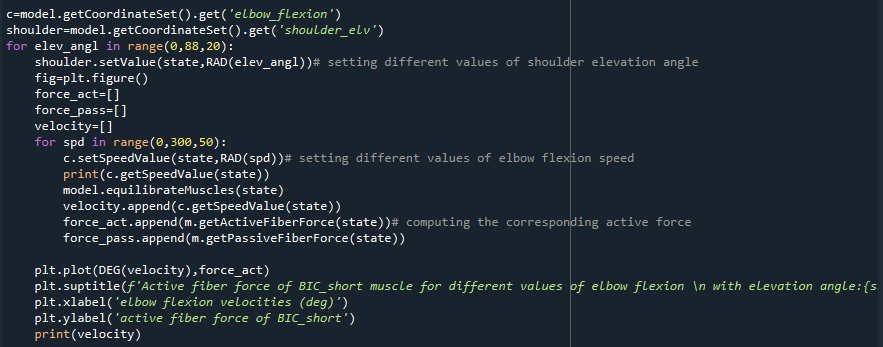
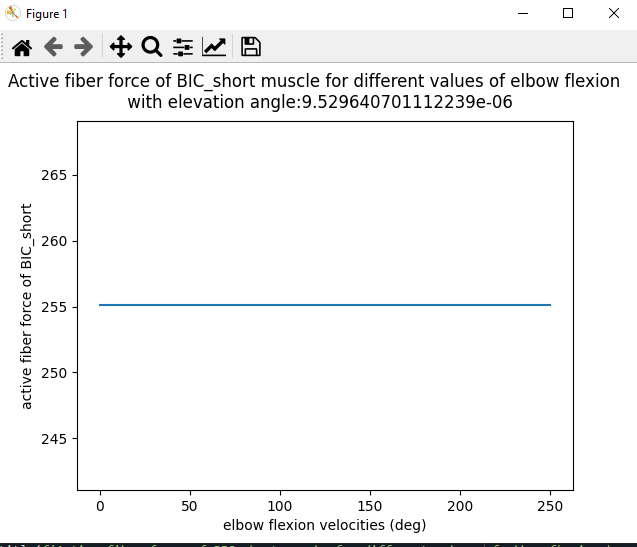
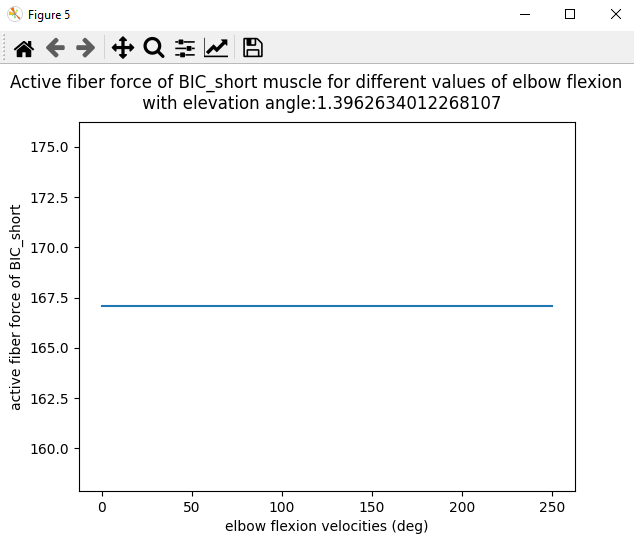
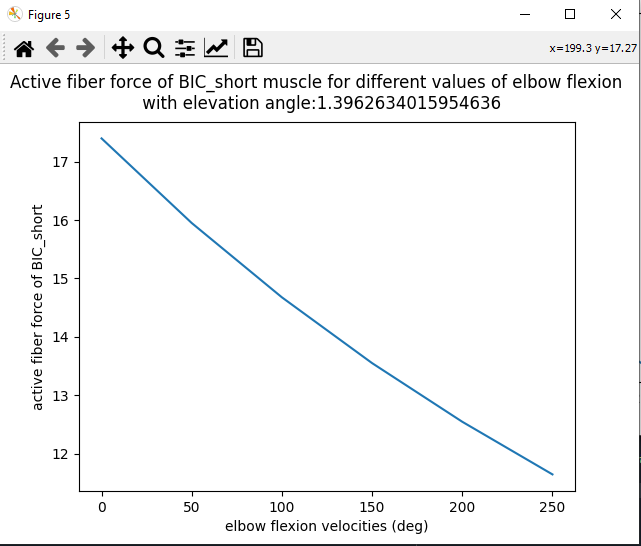
I am trying to compute the muscle active force and passive force for one muscle for different velocities of elbow flexion on a model with Millard muscles type, and i noticed that the force remains the same what ever the velocity is. (this problem does not occur with Thelen muscles type)
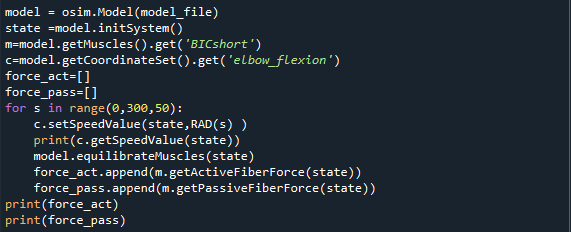
Here are the velocities i got:

To notice: The getForceVelocityCurve() function retrieves the default parameters of the function representing the force velocity relationship of the muscle:
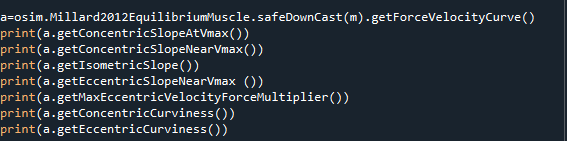
[ 0.0, 0.25, 5.0, 0.15, 1.4, 0.6, 0.9]
Opensim version: 4.1
Python version : 3.7 ( 64bits)
Opensim model :MoBL-ARMS_upper_extremity
Is there any one who knows how to solve this problem?
Thank you in advance for any ideas
Chahrazed