Code: Select all
OpenSim::Model model("arm26.osim");
model.setUseVisualizer(true);
State& state = model.initSystem(); //reference to the model state
std::vector<std::string> labels{ "r_acromion", "r_humerus_epicondyle", "r_radius_styloid" };
std::size_t nc = labels.size();
std::size_t nr = 1;
TimeSeriesTable_<SimTK::Vec3> markerData;
markerData.setColumnLabels(labels);
SimTK::RowVector_<SimTK::Vec3> row1(nc);
row1[0] = model.getMarkerSet()[0].get_location();
row1[1] = model.getMarkerSet()[1].get_location();
row1[2] = model.getMarkerSet()[2].get_location();
std::cout << std::endl << "row 1 values" << row1 << std::endl;
markerData.appendRow(0, row1);
Set<MarkerWeight> markerWeights;
for (size_t m{0}; m < nc; ++m)
markerWeights.adoptAndAppend(
new MarkerWeight(labels[m], 1.0));
std::cout << markerWeights.dump() << std::endl;
MarkersReference markersRef(markerData, markerWeights);
CoordinateSet coordinset = model.getCoordinateSet();
Constant coordRefFunc(0.0);
SimTK::Array_<OpenSim::CoordinateReference> coorrefs(coordinset.getSize());
for (int i = 0; i < coordinset.getSize(); i++)
{
std::cout << coordinset[i].getName() << std::endl; //" = " << coordinset[i].getValue(state) << std::endl;
coorrefs[i].setName(coordinset[i].getName());
coorrefs[i].setValueFunction(coordRefFunc); //coordRefFunc
}
OpenSim::InverseKinematicsSolver iksolver(model, markersRef, coorrefs, SimTK::Infinity);
iksolver.setAccuracy(1.0e-9);
model.getVisualizer().show(state);
Code: Select all
model.getVisualizer().show(state);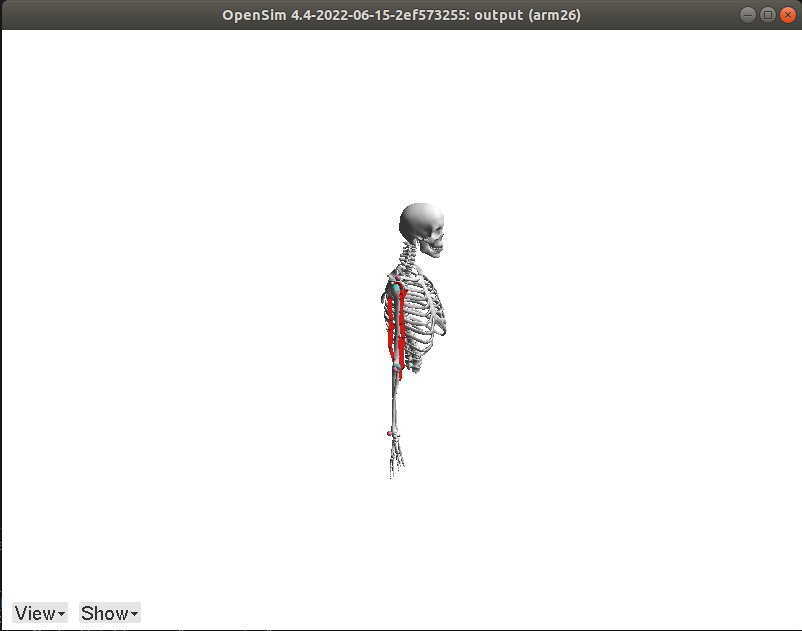
However, once I assemble the solver, i.e.
Code: Select all
iksolver.assemble(state);the model visulaizer shows a deformed model:

First of all I would like to know the error in the code.
Second of all I have a question regarding the constraints. The constraints weight is infinity in the solver. However, they seemed to be largely violated after assembly. Why is that?