#include "taoControlJt.h"
#include "taoNode.h"
#include "taoJoint.h"
#include "taoGroup.h"
#include "taoDynamics.h"
#include <assert.h>
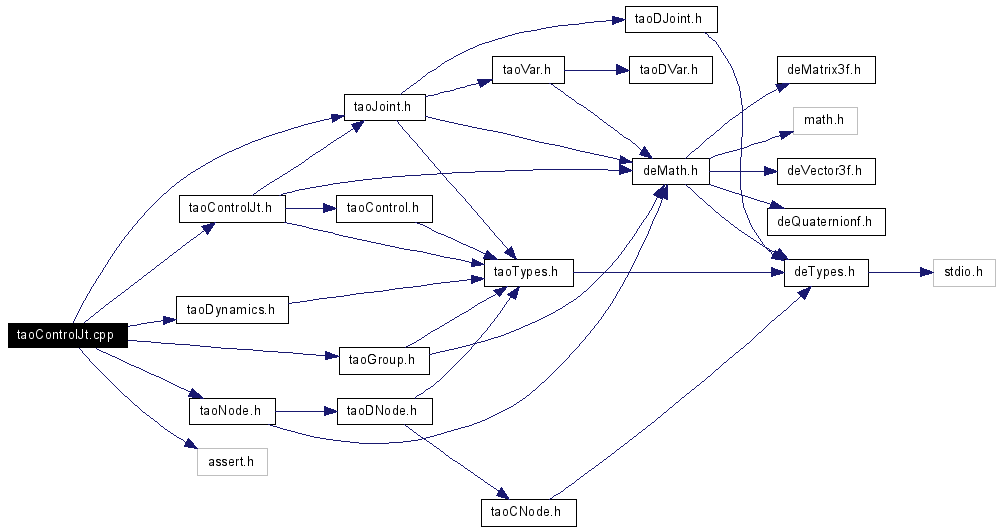
Include dependency graph for taoControlJt.cpp:
 1.4.6-NO
1.4.6-NO