|
OpenSim
OpenSim 3.0
|
|
OpenSim
OpenSim 3.0
|
A base class for modeling a muscle-tendon actuator. More...
#include <Muscle.h>
Classes | |
| struct | FiberVelocityInfo |
| FiberVelocityInfo contains velocity quantities related to the velocity of the muscle (fiber + tendon) complex. More... | |
| struct | MuscleDynamicsInfo |
| MuscleDynamicsInfo contains quantities that are related to the forces that the muscle generates. More... | |
| struct | MuscleLengthInfo |
| The MuscleLengthInfo struct contains information about the muscle that is strictly a function of the length of the fiber and the tendon, and the orientation of the muscle fiber. More... | |
Public Member Functions | |
| double | computeActuation (const SimTK::State &s) const =0 |
| Actuator interface for a muscle computes the tension in the muscle and applied by the tendon to bones (i.e. | |
Property declarations | |
These are the serializable properties associated with the Muscle class. Note that concrete muscles derived from this class inherit all these properties. | |
| OpenSim_DECLARE_PROPERTY (max_isometric_force, double,"Maximum isometric force that the fibers can generate") | |
| OpenSim_DECLARE_PROPERTY (optimal_fiber_length, double,"Optimal length of the muscle fibers") | |
| OpenSim_DECLARE_PROPERTY (tendon_slack_length, double,"Resting length of the tendon") | |
| OpenSim_DECLARE_PROPERTY (pennation_angle_at_optimal, double,"Angle between tendon and fibers at optimal fiber length expressed in radians") | |
| OpenSim_DECLARE_PROPERTY (max_contraction_velocity, double,"Maximum contraction velocity of the fibers, in optimal fiberlengths/second") | |
| OpenSim_DECLARE_PROPERTY (ignore_tendon_compliance, bool,"Compute muscle dynamics ignoring tendon compliance. Tendon is assumed to be rigid.") | |
| OpenSim_DECLARE_PROPERTY (ignore_activation_dynamics, bool,"Compute muscle dynamics ignoring activation dynamics. Activation is equivalent to excitation.") | |
Constructors and Destructor | |
| Muscle () | |
| Default constructor. | |
Muscle Parameters Access Methods | |
| double | getMaxIsometricForce () const |
| get/set the maximum isometric force (in N) that the fibers can generate | |
| void | setMaxIsometricForce (double maxIsometricForce) |
| double | getOptimalFiberLength () const |
| get/set the optimal length (in m) of the muscle fibers (lumped as a single fiber) | |
| void | setOptimalFiberLength (double optimalFiberLength) |
| double | getTendonSlackLength () const |
| get/set the resting (slack) length (in m) of the tendon that is in series with the muscle fiber | |
| void | setTendonSlackLength (double tendonSlackLength) |
| double | getPennationAngleAtOptimalFiberLength () const |
| get/set the angle (in radians) between fibers at their optimal fiber length and the tendon | |
| void | setPennationAngleAtOptimalFiberLength (double pennationAngle) |
| double | getMaxContractionVelocity () const |
| get/set the maximum contraction velocity of the fibers, in optimal fiber-lengths per second | |
| void | setMaxContractionVelocity (double maxContractionVelocity) |
Muscle State Dependent Access Methods | |
Get quantities of interest common to all muscles | |
| bool | getIgnoreTendonCompliance (const SimTK::State &s) const |
Get/set Modeling (runtime) option to ignore tendon compliance when | |
| void | setIgnoreTendonCompliance (SimTK::State &s, bool ignore) const |
| bool | getIgnoreActivationDynamics (const SimTK::State &s) const |
Get/set Modeling (runtime) option to ignore activation dynamics when | |
| void | setIgnoreActivationDynamics (SimTK::State &s, bool ignore) const |
| virtual double | getActivation (const SimTK::State &s) const |
| get the activation level of the muscle, which modulates the active force of the muscle and has a normalized (0 to 1) value TODO: virtual to allow override by deprecated muscles. | |
| double | getFiberLength (const SimTK::State &s) const |
| get the current working fiber length (m) for the muscle | |
| double | getPennationAngle (const SimTK::State &s) const |
| get the current pennation angle (radians) between the fiber and tendon at the current fiber length | |
| double | getTendonLength (const SimTK::State &s) const |
| get the current tendon length (m) given the current joint angles and fiber length | |
| double | getNormalizedFiberLength (const SimTK::State &s) const |
| get the current normalized fiber length (fiber_length/optimal_fiber_length) | |
| double | getFiberLengthAlongTendon (const SimTK::State &s) const |
| get the current fiber length (m) projected (*cos(pennationAngle)) onto the tendon direction | |
| double | getTendonStrain (const SimTK::State &s) const |
| get the current tendon strain (delta_l/tendon_slack_length is dimensionless) | |
| double | getFiberPotentialEnergy (const SimTK::State &s) const |
| the potential energy (J) stored in the fiber due to its parallel elastic element | |
| double | getTendonPotentialEnergy (const SimTK::State &s) const |
| the potential energy (J) stored in the tendon | |
| double | getMusclePotentialEnergy (const SimTK::State &s) const |
| the total potential energy (J) stored in the muscle | |
| double | getPassiveForceMultiplier (const SimTK::State &s) const |
| get the passive fiber (parallel elastic element) force multiplier | |
| double | getActiveForceLengthMultiplier (const SimTK::State &s) const |
| get the active fiber (contractile element) force multiplier due to current fiber length | |
| double | getFiberVelocity (const SimTK::State &s) const |
| get current fiber velocity (m/s) positive is lengthening | |
| double | getNormalizedFiberVelocity (const SimTK::State &s) const |
| get normalize fiber velocity (fiber_lengths/s / max_contraction_velocity) | |
| double | getFiberVelocityAlongTendon (const SimTK::State &s) const |
| get the current afiber velocity (m/s) projected onto the tendon direction | |
| double | getPennationAngularVelocity (const SimTK::State &s) const |
| get pennation angular velocity (radians/s) | |
| double | getTendonVelocity (const SimTK::State &s) const |
| get the tendon velocity (m/s) positive is lengthening | |
| double | getForceVelocityMultiplier (const SimTK::State &s) const |
| get the dimensionless multiplier resulting from the fiber's force-velocity curve | |
| double | getFiberForce (const SimTK::State &s) const |
| get the current fiber force (N) applied to the tendon | |
| double | getActiveFiberForce (const SimTK::State &s) const |
| get the current active fiber force (N) due to activation*force_length*force_velocity relationships | |
| double | getPassiveFiberForce (const SimTK::State &s) const |
| get the current passive fiber force (N) passive_force_length relationship | |
| double | getActiveFiberForceAlongTendon (const SimTK::State &s) const |
| get the current active fiber force (N) projected onto the tendon direction | |
| double | getPassiveFiberForceAlongTendon (const SimTK::State &s) const |
| get the current passive fiber force (N) projected onto the tendon direction | |
| double | getTendonForce (const SimTK::State &s) const |
| get the current tendon force (N) applied to bones | |
| double | getFiberStiffness (const SimTK::State &s) const |
| get the current fiber stiffness (N/m) defined as the partial derivative of fiber force w.r.t. | |
| double | getTendonStiffness (const SimTK::State &s) const |
| get the current tendon stiffness (N/m) defined as the partial derivative of tendon force w.r.t. | |
| double | getMuscleStiffness (const SimTK::State &s) const |
| get the current muscle stiffness (N/m) defined as the partial derivative of muscle force w.r.t. | |
| double | getFiberActivePower (const SimTK::State &s) const |
| get the current active fiber power (W) | |
| double | getFiberPassivePower (const SimTK::State &s) const |
| get the current passive fiber power (W) | |
| double | getTendonPower (const SimTK::State &s) const |
| get the current tendon power (W) | |
| double | getMusclePower (const SimTK::State &s) const |
| get the current muscle power (W) | |
| double | getStress (const SimTK::State &s) const |
| get the stress in the muscle (part of the Actuator interface as well) | |
| void | setExcitation (SimTK::State &s, double excitation) const |
| set the excitation (control) for this muscle. | |
| double | getExcitation (const SimTK::State &s) const |
| virtual void | setActivation (SimTK::State &s, double activation) const =0 |
| DEPRECATED: only for backward compatibility. | |
Muscle initialization | |
| void | equilibrate (SimTK::State &s) const |
| Find and set the equilibrium state of the muscle (if any) | |
 Public Member Functions inherited from OpenSim::PathActuator Public Member Functions inherited from OpenSim::PathActuator | |
| PathActuator () | |
| GeometryPath & | updGeometryPath () |
| const GeometryPath & | getGeometryPath () const |
| virtual bool | hasGeometryPath () const |
| Return a flag indicating whether the Force is applied along a Path. | |
| void | setOptimalForce (double aOptimalForce) |
| double | getOptimalForce () const |
| virtual double | getLength (const SimTK::State &s) const |
| virtual double | getLengtheningSpeed (const SimTK::State &s) const |
| virtual double | getPower (const SimTK::State &s) const |
| void | addNewPathPoint (const std::string &proposedName, OpenSim::Body &aBody, const SimTK::Vec3 &aPositionOnBody) |
| Note that this function does not maintain the State and so should be used only before a valid State is created. | |
| virtual double | computeMomentArm (SimTK::State &s, Coordinate &aCoord) const |
| virtual void | updateFromXMLNode (SimTK::Xml::Element &aNode, int versionNumber=-1) |
| Use this method to deserialize an object from a SimTK::Xml::Element. | |
| virtual void | preScale (const SimTK::State &s, const ScaleSet &aScaleSet) |
| virtual void | scale (const SimTK::State &s, const ScaleSet &aScaleSet) |
| virtual void | postScale (const SimTK::State &s, const ScaleSet &aScaleSet) |
| virtual VisibleObject * | getDisplayer () const |
| Methods to support making the object displayable in the GUI or Visualizer Implemented only in few objects. | |
| virtual void | updateDisplayer (const SimTK::State &s) |
| In case the ModelComponent has a visual representation (VisualObject), override this method to update it. | |
| OpenSim_DECLARE_UNNAMED_PROPERTY (GeometryPath,"The set of points defining the path of the muscle.") | |
| OpenSim_DECLARE_PROPERTY (optimal_force, double,"The maximum force this actuator can produce.") | |
| Public Member Functions inherited from OpenSim::Actuator | |
| Actuator () | |
| virtual double | getControl (const SimTK::State &s) const |
| Convenience method to set controls given scalar (double) valued control. | |
| virtual int | numControls () const |
| virtual void | setForce (const SimTK::State &s, double aForce) const |
| virtual double | getForce (const SimTK::State &s) const |
| virtual void | setSpeed (const SimTK::State &s, double aspeed) const |
| virtual double | getSpeed (const SimTK::State &s) const |
| void | setMinControl (const double &aMinControl) |
| double | getMinControl () const |
| void | setMaxControl (const double &aMaxControl) |
| double | getMaxControl () const |
| void | overrideForce (SimTK::State &s, bool flag) const |
Overriding forcesThe force normally produced by an Actuator can be overriden and When the Actuator's force is overriden, the Actuator will by defualt produce a constant force which can be set with setOverrideForce(). | |
| bool | isForceOverriden (const SimTK::State &s) const |
| return Actuator's override status | |
| void | setOverrideForce (SimTK::State &s, double value) const |
| set the force value used when the override is true | |
| double | getOverrideForce (const SimTK::State &s) const |
| return override force | |
| OpenSim_DECLARE_PROPERTY (min_control, double,"Minimum allowed value for control signal. Used primarily when solving ""for control values.") | |
| Default is -Infinity (no limit). | |
| OpenSim_DECLARE_PROPERTY (max_control, double,"Maximum allowed value for control signal. Used primarily when solving ""for control values.") | |
| Default is Infinity (no limit). | |
| Public Member Functions inherited from OpenSim::Actuator_ | |
| Actuator_ () | |
| virtual const SimTK::Vector | getDefaultControls () |
| Actuator default controls are zero. | |
| virtual const SimTK::VectorView_< double > | getControls (const SimTK::State &s) const |
| virtual void | getControls (const SimTK::Vector &modelControls, SimTK::Vector &actuatorControls) const |
| Convenience methods for getting, setting and adding to actuator controls from/into the model controls. | |
| virtual void | setControls (const SimTK::Vector &actuatorControls, SimTK::Vector &modelControls) const |
| set actuator controls subvector into the right slot in the system-wide model controls | |
| virtual void | addInControls (const SimTK::Vector &actuatorControls, SimTK::Vector &modelControls) const |
| add actuator controls to the values already occupying the slot in the system-wide model controls | |
| virtual void | computeEquilibrium (SimTK::State &s) const |
| Public Member Functions inherited from OpenSim::Force | |
| Force (const Force &aForce) | |
Implements a copy constructor just so it can invalidate the | |
| Force & | operator= (const Force &aForce) |
Implements a copy assignment operator just so it can invalidate the | |
| bool | isDisabled (const SimTK::State &s) const |
| Return if the Force is disabled or not. | |
| void | setDisabled (SimTK::State &s, bool disabled) |
| Set the Force as disabled (true) or not (false). | |
| OpenSim_DECLARE_PROPERTY (isDisabled, bool,"Flag indicating whether the force is disabled or not. Disabled means"" that the force is not active in subsequent dynamics realizations.") | |
| A Force element is active (enabled) by default. | |
| Public Member Functions inherited from OpenSim::ModelComponent | |
| ModelComponent () | |
| Default constructor. | |
| ModelComponent (const std::string &aFileName, bool aUpdateFromXMLNode=true) SWIG_DECLARE_EXCEPTION | |
| Construct ModelComponent from an XML file. | |
| ModelComponent (SimTK::Xml::Element &aNode) | |
| Construct ModelComponent from a specific node in an XML document. | |
| ModelComponent (const ModelComponent &source) | |
Construct ModelComponent with its contents copied from another ModelComponent; this is a deep copy so nothing is shared with the source after the copy. | |
| virtual | ~ModelComponent () |
| Destructor is virtual to allow concrete model component cleanup. | |
| ModelComponent & | operator= (const ModelComponent &aModelComponent) |
| Assignment operator to copy contents of an existing component. | |
| const Model & | getModel () const |
| Get a const reference to the Model this component is part of. | |
| Model & | updModel () |
| Get a modifiable reference to the Model this component is part of. | |
| virtual int | getNumStateVariables () const |
| Get the number of "Continuous" state variables maintained by the ModelComponent and its specified subcomponents. | |
| virtual Array< std::string > | getStateVariableNames () const |
| Get the names of "continuous" state variables maintained by the ModelComponent and its subcomponents. | |
| virtual SimTK::SystemYIndex | getStateVariableSystemIndex (const std::string &stateVariableName) const |
| Get the System Index of a state variable allocated by this ModelComponent. | |
| int | getModelingOption (const SimTK::State &state, const std::string &name) const |
| Get a ModelingOption flag for this ModelComponent by name. | |
| void | setModelingOption (SimTK::State &state, const std::string &name, int flag) const |
| Set the value of a ModelingOption flag for this ModelComponent. | |
| double | getStateVariable (const SimTK::State &state, const std::string &name) const |
| Get the value of a state variable allocated by this ModelComponent. | |
| void | setStateVariable (SimTK::State &state, const std::string &name, double value) const |
| Set the value of a state variable allocated by this ModelComponent by name. | |
| double | getDiscreteVariable (const SimTK::State &state, const std::string &name) const |
| Get the value of a discrete variable allocated by this ModelComponent by name. | |
| void | setDiscreteVariable (SimTK::State &state, const std::string &name, double value) const |
| Set the value of a discrete variable allocated by this ModelComponent by name. | |
| template<typename T > | |
| const T & | getCacheVariable (const SimTK::State &state, const std::string &name) const |
| Get the value of a cache variable allocated by this ModelComponent by name. | |
| template<typename T > | |
| T & | updCacheVariable (const SimTK::State &state, const std::string &name) const |
| Obtain a writable cache variable value allocated by this ModelComponent by name. | |
| void | markCacheVariableValid (const SimTK::State &state, const std::string &name) const |
| After updating a cache variable value allocated by this ModelComponent, you can mark its value as valid, which will not change until the realization stage falls below the minimum set at the time the cache variable was created. | |
| void | markCacheVariableInvalid (const SimTK::State &state, const std::string &name) const |
| Mark a cache variable value allocated by this ModelComponent as invalid. | |
| bool | isCacheVariableValid (const SimTK::State &state, const std::string &name) const |
| Enables the to monitor the validity of the cache variable value using the returned flag. | |
| template<typename T > | |
| void | setCacheVariable (const SimTK::State &state, const std::string &name, T &value) const |
| Set cache variable value allocated by this ModelComponent by name. | |
| Public Member Functions inherited from OpenSim::Object | |
| virtual | ~Object () |
| Virtual destructor for cleanup. | |
| virtual Object * | clone () const =0 |
Create a new heap-allocated copy of the concrete object to which this | |
| virtual const std::string & | getConcreteClassName () const =0 |
Returns the class name of the concrete %Object-derived class of the | |
| virtual VisibleObject * | updDisplayer () |
| get Non const pointer to VisibleObject | |
| bool | isEqualTo (const Object &aObject) const |
| Equality operator wrapper for use from languages not supporting operator overloading. | |
| Object & | operator= (const Object &aObject) |
Copy assignment copies he base class fields, including the | |
| virtual bool | operator== (const Object &aObject) const |
| Determine if two objects are equal. | |
| virtual bool | operator< (const Object &aObject) const |
Provide an ordering for objects so they can be put in sorted | |
| void | setName (const std::string &name) |
| Set the name of the Object. | |
| const std::string & | getName () const |
| Get the name of this Object. | |
| void | setDescription (const std::string &description) |
| Set description, a one-liner summary. | |
| const std::string & | getDescription () const |
| Get description, a one-liner summary. | |
| const std::string & | getAuthors () const |
| Get Authors of this Object. | |
| void | setAuthors (const std::string &authors) |
| Set Authors of this object, call this method in your constructor if needed. | |
| const std::string & | getReferences () const |
| Get references or publications to cite if using this object. | |
| void | setReferences (const std::string &references) |
| Set references or publications to cite if using this object. | |
| int | getNumProperties () const |
| Determine how many properties are stored with this Object. | |
| const AbstractProperty & | getPropertyByIndex (int propertyIndex) const |
Get a const reference to a property by its index number, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByIndex (int propertyIndex) |
Get a writable reference to a property by its index number, returned as an AbstractProperty. | |
| bool | hasProperty (const std::string &name) const |
Return true if this %Object has a property of any type with the | |
| const AbstractProperty & | getPropertyByName (const std::string &name) const |
Get a const reference to a property by its name, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByName (const std::string &name) |
Get a writable reference to a property by its name, returned as an AbstractProperty. | |
| template<class T > | |
| bool | hasProperty () const |
Return true if this %Object contains an unnamed, one-object property | |
| template<class T > | |
| const Property< T > & | getProperty (const PropertyIndex &index) const |
Get property of known type Property\<T> as a const reference; | |
| template<class T > | |
| Property< T > & | updProperty (const PropertyIndex &index) |
Get property of known type Property\<T> as a writable reference; | |
| void | setObjectIsUpToDateWithProperties () |
When an object is initialized using the current values of its properties, it can set a flag indicating that it is up to date. | |
| bool | isObjectUpToDateWithProperties () const |
Returns \c true if any property's value has changed since the last time setObjectIsUpToDateWithProperties() was called. | |
| void | readObjectFromXMLNodeOrFile (SimTK::Xml::Element &objectElement, int versionNumber) |
| We're given an XML element from which we are to populate this Object. | |
| virtual void | updateXMLNode (SimTK::Xml::Element &parent) |
| Serialize this object into the XML node that represents it. | |
| bool | getInlined () const |
Inlined means an in-memory Object that is not associated with an XMLDocument. | |
| void | setInlined (bool aInlined, const std::string &aFileName="") |
Mark this as inlined or not and optionally provide a file name to associate with the new XMLDocument for the non-inline case. | |
| std::string | getDocumentFileName () const |
If there is a document associated with this object then return the | |
| void | setAllPropertiesUseDefault (bool aUseDefault) |
| bool | print (const std::string &fileName) |
Write this %Object into an XML file of the given name; conventionally | |
| std::string | dump (bool dumpName=false) |
| dump the XML representation of this Object into an std::string and return it. | |
| void | clearObjectIsUpToDateWithProperties () |
For testing or debugging purposes, manually clear the "object is up to | |
| virtual bool | isA (const char *type) const |
The default implementation returns true only if the supplied string is "Object"; each Object-derived class overrides this to match its own class name. | |
| const std::string & | toString () const |
Wrapper to be used on Java side to display objects in tree; this returns | |
| PropertySet & | getPropertySet () |
OBSOLETE: Get a reference to the PropertySet maintained by the | |
| const PropertySet & | getPropertySet () const |
Protected Member Functions | |
| const MuscleLengthInfo & | getMuscleLengthInfo (const SimTK::State &s) const |
| Developer Access to intermediate values calculate by the muscle model. | |
| MuscleLengthInfo & | updMuscleLengthInfo (const SimTK::State &s) const |
| const FiberVelocityInfo & | getFiberVelocityInfo (const SimTK::State &s) const |
| FiberVelocityInfo & | updFiberVelocityInfo (const SimTK::State &s) const |
| const MuscleDynamicsInfo & | getMuscleDynamicsInfo (const SimTK::State &s) const |
| MuscleDynamicsInfo & | updMuscleDynamicsInfo (const SimTK::State &s) const |
Muscle State Dependent Calculations | |
Developers must override these methods to implement the desired behavior of their muscle models. Unless you are augmenting the behavior of an existing muscle class or writing a new derived class, you do not have access to these methods. | |
| virtual void | calcMuscleLengthInfo (const SimTK::State &s, MuscleLengthInfo &mli) const |
| calculate muscle's position related values such fiber and tendon lengths, normalized lengths, pennation angle, etc... | |
| virtual void | calcFiberVelocityInfo (const SimTK::State &s, FiberVelocityInfo &fvi) const |
| calculate muscle's fiber velocity and pennation angular velocity, etc... | |
| virtual void | calcMuscleDynamicsInfo (const SimTK::State &s, MuscleDynamicsInfo &mdi) const |
| calculate muscle's active and passive force-length, force-velocity, tendon force, relationships and their related values | |
| virtual void | computeInitialFiberEquilibrium (SimTK::State &s) const =0 |
| compute initial fiber length (velocity) such that muscle fiber and tendon are in static equilibrium and update the state | |
Interfaces imposed by parent classes | |
| virtual void | computeForce (const SimTK::State &state, SimTK::Vector_< SimTK::SpatialVec > &bodyForces, SimTK::Vector &generalizedForce) const |
| Force interface applies tension to bodies, and Muscle also checks that applied muscle tension is not negative. | |
| virtual double | computePotentialEnergy (const SimTK::State &state) const |
| Potential energy stored by the muscle. | |
| void | connectToModel (Model &aModel) override |
| Model Component creation interface. | |
| void | addToSystem (SimTK::MultibodySystem &system) const override |
Default is to create a ForceAdapter which is a SimTK::Force::Custom | |
| void | setPropertiesFromState (const SimTK::State &s) override |
Subclass should override; be sure to invoke Force::setPropertiesFromState() at the beginning of the overriding method. | |
| void | initStateFromProperties (SimTK::State &state) const override |
Subclass should override; be sure to invoke Force::initStateFromProperties() at the | |
| virtual void | updateGeometry (const SimTK::State &s) |
Protected Attributes | |
| double | _muscleWidth |
| The assumed fixed muscle-width from which the fiber pennation angle is calculated. | |
| double | _maxIsometricForce |
| to support deprecated muscles | |
| double | _optimalFiberLength |
| double | _pennationAngleAtOptimal |
| double | _tendonSlackLength |
Additional Inherited Members | |
| Static Public Member Functions inherited from OpenSim::Object | |
| static void | registerType (const Object &defaultObject) |
Register an instance of a class; if the class is already registered it | |
| static void | renameType (const std::string &oldTypeName, const std::string &newTypeName) |
Support versioning by associating the current %Object type with an | |
| static const Object * | getDefaultInstanceOfType (const std::string &concreteClassName) |
Return a pointer to the default instance of the registered (concrete) Object whose class name is given, or NULL if the type is not registered. | |
| template<class T > | |
| static bool | isObjectTypeDerivedFrom (const std::string &concreteClassName) |
Return true if the given concrete object type represents a subclass of the template object type T, and thus could be referenced with a T*. | |
| static Object * | newInstanceOfType (const std::string &concreteClassName) |
Create a new instance of the concrete %Object type whose class name is | |
| static void | getRegisteredTypenames (Array< std::string > &typeNames) |
| Retrieve all the typenames registered so far. | |
| template<class T > | |
| static void | getRegisteredObjectsOfGivenType (ArrayPtrs< T > &rArray) |
Return an array of pointers to the default instances of all registered (concrete) Object types that derive from a given Object-derived type that does not have to be concrete. | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &classNameDotPropertyName) |
Dump formatted property information to a given output stream, useful | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &className, const std::string &propertyName) |
Same as the other signature but the class name and property name are | |
| static Object * | makeObjectFromFile (const std::string &fileName) |
Create an %OpenSim object whose type is based on the tag at the root | |
| static const std::string & | getClassName () |
| Return the name of this class as a string; i.e., "Object". | |
| static void | setSerializeAllDefaults (bool shouldSerializeDefaults) |
Static function to control whether all registered objects and their properties are written to the defaults section of output files rather than only those values for which the default was explicitly overwritten when read in from an input file or set programmatically. | |
| static bool | getSerializeAllDefaults () |
| Report the value of the "serialize all defaults" flag. | |
| static bool | isKindOf (const char *type) |
Returns true if the passed-in string is "Object"; each %Object-derived | |
| static void | setDebugLevel (int newLevel) |
| Set the debug level to get verbose output. | |
| static int | getDebugLevel () |
| Get current setting of debug level. | |
| static Object * | SafeCopy (const Object *aObject) |
Use the clone() method to duplicate the given object unless the pointer | |
| static void | RegisterType (const Object &defaultObject) |
| OBSOLETE alternate name for registerType(). | |
| static void | RenameType (const std::string &oldName, const std::string &newName) |
| OBSOLETE alternate name for renameType(). | |
| Static Public Attributes inherited from OpenSim::Object | |
| static const std::string | DEFAULT_NAME |
| Name used for default objects when they are serialized. | |
| Related Functions inherited from OpenSim::Object | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any non-templatized, concrete class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any still-abstract class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, concrete class that derives from OpenSim::Object, like Set<T>. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, still-abstract class that derives from OpenSim::Object. | |
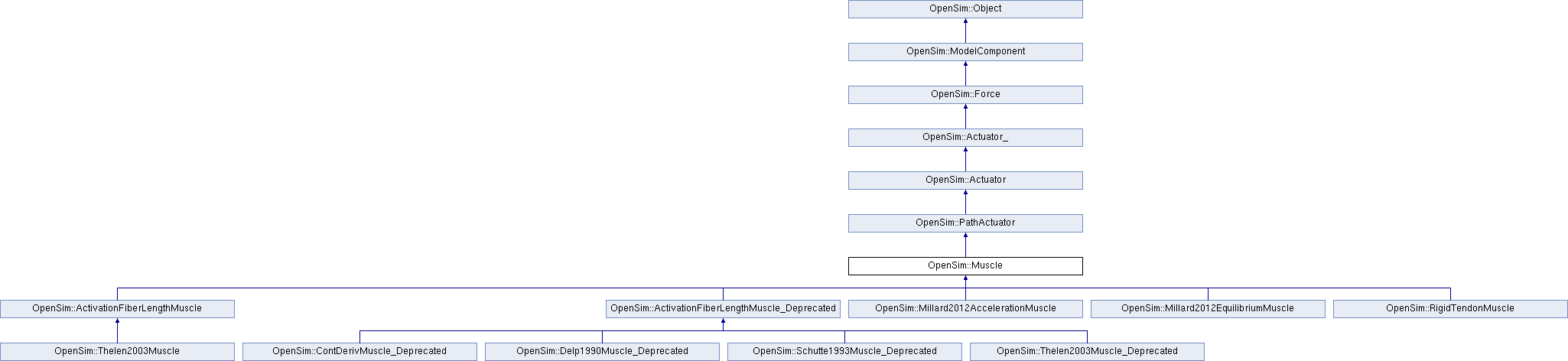
A base class for modeling a muscle-tendon actuator.
It defines muscle parameters and methods to PathActuator, but does not implement all of the necessary methods, and remains an abstract class. The path information for a muscle is contained in PathActuator, and the force-generating behavior should be defined in the derived classes.
This class defines a subset of muscle models that include an active fiber (contractile element) in series with a tendon. This class defines common data members and handles the geometry of a unipennate fiber in connection with a tendon. No states are assumed, but concrete classes are free to add whatever states are necessary to describe the specific behavior of a muscle.
(Based on earlier work by Peter Loan and Frank C. Anderson.)
| OpenSim::Muscle::Muscle | ( | ) |
Default constructor.
|
overrideprotectedvirtual |
Default is to create a ForceAdapter which is a SimTK::Force::Custom
as the underlying computational component.
Subclasses override to employ other SimTK::Forces; be sure to invoke Force::addToSystem() at the beginning of the overriding method.
Reimplemented from OpenSim::Actuator.
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::Thelen2003Muscle, OpenSim::ContDerivMuscle_Deprecated, OpenSim::Delp1990Muscle_Deprecated, OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle.
|
protectedvirtual |
calculate muscle's fiber velocity and pennation angular velocity, etc...
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::Thelen2003Muscle, OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::RigidTendonMuscle.
|
protectedvirtual |
calculate muscle's active and passive force-length, force-velocity, tendon force, relationships and their related values
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::Thelen2003Muscle, OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::RigidTendonMuscle.
|
protectedvirtual |
calculate muscle's position related values such fiber and tendon lengths, normalized lengths, pennation angle, etc...
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::Thelen2003Muscle, OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::RigidTendonMuscle.
|
pure virtual |
Actuator interface for a muscle computes the tension in the muscle and applied by the tendon to bones (i.e.
not the fiber force)
Reimplemented from OpenSim::PathActuator.
Implemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::Thelen2003Muscle, OpenSim::ContDerivMuscle_Deprecated, OpenSim::Thelen2003Muscle_Deprecated, OpenSim::Delp1990Muscle_Deprecated, OpenSim::ActivationFiberLengthMuscle_Deprecated, OpenSim::RigidTendonMuscle, and OpenSim::Schutte1993Muscle_Deprecated.
|
protectedvirtual |
Force interface applies tension to bodies, and Muscle also checks that applied muscle tension is not negative.
Reimplemented from OpenSim::PathActuator.
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle.
|
protectedpure virtual |
compute initial fiber length (velocity) such that muscle fiber and tendon are in static equilibrium and update the state
Implemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::Thelen2003Muscle, OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::RigidTendonMuscle.
|
protectedvirtual |
Potential energy stored by the muscle.
Reimplemented from OpenSim::Force.
|
overrideprotectedvirtual |
Model Component creation interface.
Reimplemented from OpenSim::PathActuator.
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::ContDerivMuscle_Deprecated, OpenSim::Delp1990Muscle_Deprecated, and OpenSim::Schutte1993Muscle_Deprecated.
|
inline |
Find and set the equilibrium state of the muscle (if any)
Reimplemented in OpenSim::RigidTendonMuscle, and OpenSim::ActivationFiberLengthMuscle_Deprecated.
|
virtual |
get the activation level of the muscle, which modulates the active force of the muscle and has a normalized (0 to 1) value TODO: virtual to allow override by deprecated muscles.
Reimplemented in OpenSim::ContDerivMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getActiveFiberForce | ( | const SimTK::State & | s | ) | const |
get the current active fiber force (N) due to activation*force_length*force_velocity relationships
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getActiveFiberForceAlongTendon | ( | const SimTK::State & | s | ) | const |
get the current active fiber force (N) projected onto the tendon direction
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getActiveForceLengthMultiplier | ( | const SimTK::State & | s | ) | const |
get the active fiber (contractile element) force multiplier due to current fiber length
| double OpenSim::Muscle::getExcitation | ( | const SimTK::State & | s | ) | const |
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getFiberActivePower | ( | const SimTK::State & | s | ) | const |
get the current active fiber power (W)
| double OpenSim::Muscle::getFiberForce | ( | const SimTK::State & | s | ) | const |
get the current fiber force (N) applied to the tendon
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getFiberLength | ( | const SimTK::State & | s | ) | const |
get the current working fiber length (m) for the muscle
Reimplemented in OpenSim::ContDerivMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getFiberLengthAlongTendon | ( | const SimTK::State & | s | ) | const |
get the current fiber length (m) projected (*cos(pennationAngle)) onto the tendon direction
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getFiberPassivePower | ( | const SimTK::State & | s | ) | const |
get the current passive fiber power (W)
| double OpenSim::Muscle::getFiberPotentialEnergy | ( | const SimTK::State & | s | ) | const |
the potential energy (J) stored in the fiber due to its parallel elastic element
| double OpenSim::Muscle::getFiberStiffness | ( | const SimTK::State & | s | ) | const |
get the current fiber stiffness (N/m) defined as the partial derivative of fiber force w.r.t.
fiber length
| double OpenSim::Muscle::getFiberVelocity | ( | const SimTK::State & | s | ) | const |
get current fiber velocity (m/s) positive is lengthening
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, and OpenSim::Delp1990Muscle_Deprecated.
| double OpenSim::Muscle::getFiberVelocityAlongTendon | ( | const SimTK::State & | s | ) | const |
get the current afiber velocity (m/s) projected onto the tendon direction
|
protected |
| double OpenSim::Muscle::getForceVelocityMultiplier | ( | const SimTK::State & | s | ) | const |
get the dimensionless multiplier resulting from the fiber's force-velocity curve
| bool OpenSim::Muscle::getIgnoreActivationDynamics | ( | const SimTK::State & | s | ) | const |
Get/set Modeling (runtime) option to ignore activation dynamics when
computing muscle dynamics.
This does not directly modify the persistent property value.
| bool OpenSim::Muscle::getIgnoreTendonCompliance | ( | const SimTK::State & | s | ) | const |
Get/set Modeling (runtime) option to ignore tendon compliance when
computing muscle dynamics.
This does not directly modify the persistent property value.
| double OpenSim::Muscle::getMaxContractionVelocity | ( | ) | const |
get/set the maximum contraction velocity of the fibers, in optimal fiber-lengths per second
| double OpenSim::Muscle::getMaxIsometricForce | ( | ) | const |
get/set the maximum isometric force (in N) that the fibers can generate
|
protected |
|
protected |
Developer Access to intermediate values calculate by the muscle model.
| double OpenSim::Muscle::getMusclePotentialEnergy | ( | const SimTK::State & | s | ) | const |
the total potential energy (J) stored in the muscle
| double OpenSim::Muscle::getMusclePower | ( | const SimTK::State & | s | ) | const |
get the current muscle power (W)
| double OpenSim::Muscle::getMuscleStiffness | ( | const SimTK::State & | s | ) | const |
get the current muscle stiffness (N/m) defined as the partial derivative of muscle force w.r.t.
muscle length
| double OpenSim::Muscle::getNormalizedFiberLength | ( | const SimTK::State & | s | ) | const |
get the current normalized fiber length (fiber_length/optimal_fiber_length)
Reimplemented in OpenSim::ContDerivMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getNormalizedFiberVelocity | ( | const SimTK::State & | s | ) | const |
get normalize fiber velocity (fiber_lengths/s / max_contraction_velocity)
| double OpenSim::Muscle::getOptimalFiberLength | ( | ) | const |
get/set the optimal length (in m) of the muscle fibers (lumped as a single fiber)
| double OpenSim::Muscle::getPassiveFiberForce | ( | const SimTK::State & | s | ) | const |
get the current passive fiber force (N) passive_force_length relationship
Reimplemented in OpenSim::ContDerivMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getPassiveFiberForceAlongTendon | ( | const SimTK::State & | s | ) | const |
get the current passive fiber force (N) projected onto the tendon direction
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getPassiveForceMultiplier | ( | const SimTK::State & | s | ) | const |
get the passive fiber (parallel elastic element) force multiplier
| double OpenSim::Muscle::getPennationAngle | ( | const SimTK::State & | s | ) | const |
get the current pennation angle (radians) between the fiber and tendon at the current fiber length
| double OpenSim::Muscle::getPennationAngleAtOptimalFiberLength | ( | ) | const |
get/set the angle (in radians) between fibers at their optimal fiber length and the tendon
| double OpenSim::Muscle::getPennationAngularVelocity | ( | const SimTK::State & | s | ) | const |
get pennation angular velocity (radians/s)
|
virtual |
get the stress in the muscle (part of the Actuator interface as well)
Reimplemented from OpenSim::PathActuator.
Reimplemented in OpenSim::ContDerivMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getTendonForce | ( | const SimTK::State & | s | ) | const |
get the current tendon force (N) applied to bones
Reimplemented in OpenSim::ContDerivMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getTendonLength | ( | const SimTK::State & | s | ) | const |
get the current tendon length (m) given the current joint angles and fiber length
Reimplemented in OpenSim::ActivationFiberLengthMuscle_Deprecated.
| double OpenSim::Muscle::getTendonPotentialEnergy | ( | const SimTK::State & | s | ) | const |
the potential energy (J) stored in the tendon
| double OpenSim::Muscle::getTendonPower | ( | const SimTK::State & | s | ) | const |
get the current tendon power (W)
| double OpenSim::Muscle::getTendonSlackLength | ( | ) | const |
get/set the resting (slack) length (in m) of the tendon that is in series with the muscle fiber
| double OpenSim::Muscle::getTendonStiffness | ( | const SimTK::State & | s | ) | const |
get the current tendon stiffness (N/m) defined as the partial derivative of tendon force w.r.t.
tendon length
| double OpenSim::Muscle::getTendonStrain | ( | const SimTK::State & | s | ) | const |
get the current tendon strain (delta_l/tendon_slack_length is dimensionless)
| double OpenSim::Muscle::getTendonVelocity | ( | const SimTK::State & | s | ) | const |
get the tendon velocity (m/s) positive is lengthening
|
overrideprotectedvirtual |
Subclass should override; be sure to invoke Force::initStateFromProperties() at the
beginning of the overriding method.
Reimplemented from OpenSim::Force.
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle.
| OpenSim::Muscle::OpenSim_DECLARE_PROPERTY | ( | max_isometric_force | , |
| double | , | ||
| "Maximum isometric force that the fibers can generate" | |||
| ) |
| OpenSim::Muscle::OpenSim_DECLARE_PROPERTY | ( | optimal_fiber_length | , |
| double | , | ||
| "Optimal length of the muscle fibers" | |||
| ) |
| OpenSim::Muscle::OpenSim_DECLARE_PROPERTY | ( | tendon_slack_length | , |
| double | , | ||
| "Resting length of the tendon" | |||
| ) |
| OpenSim::Muscle::OpenSim_DECLARE_PROPERTY | ( | pennation_angle_at_optimal | , |
| double | , | ||
| "Angle between tendon and fibers at optimal fiber length expressed in radians" | |||
| ) |
| OpenSim::Muscle::OpenSim_DECLARE_PROPERTY | ( | max_contraction_velocity | , |
| double | , | ||
| "Maximum contraction velocity of the | fibers, | ||
| in optimal fiberlengths/second" | |||
| ) |
| OpenSim::Muscle::OpenSim_DECLARE_PROPERTY | ( | ignore_tendon_compliance | , |
| bool | , | ||
| "Compute muscle dynamics ignoring tendon compliance. Tendon is assumed to be rigid." | |||
| ) |
| OpenSim::Muscle::OpenSim_DECLARE_PROPERTY | ( | ignore_activation_dynamics | , |
| bool | , | ||
| "Compute muscle dynamics ignoring activation dynamics. Activation is equivalent to excitation." | |||
| ) |
|
pure virtual |
DEPRECATED: only for backward compatibility.
Implemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::ContDerivMuscle_Deprecated, OpenSim::ActivationFiberLengthMuscle_Deprecated, OpenSim::ActivationFiberLengthMuscle, and OpenSim::RigidTendonMuscle.
| void OpenSim::Muscle::setExcitation | ( | SimTK::State & | s, |
| double | excitation | ||
| ) | const |
set the excitation (control) for this muscle.
NOTE if controllers are connected to the muscle and are adding in their controls, and setExcitation is called after the model's computeControls(), then setExcitation will override the controller values. If called before computeControls, then controller value(s) are added to the excitation set here.
| void OpenSim::Muscle::setIgnoreActivationDynamics | ( | SimTK::State & | s, |
| bool | ignore | ||
| ) | const |
| void OpenSim::Muscle::setIgnoreTendonCompliance | ( | SimTK::State & | s, |
| bool | ignore | ||
| ) | const |
| void OpenSim::Muscle::setMaxContractionVelocity | ( | double | maxContractionVelocity | ) |
| void OpenSim::Muscle::setMaxIsometricForce | ( | double | maxIsometricForce | ) |
| void OpenSim::Muscle::setOptimalFiberLength | ( | double | optimalFiberLength | ) |
| void OpenSim::Muscle::setPennationAngleAtOptimalFiberLength | ( | double | pennationAngle | ) |
|
overrideprotectedvirtual |
Subclass should override; be sure to invoke
Force::setPropertiesFromState() at the beginning of the overriding method.
Reimplemented from OpenSim::Force.
Reimplemented in OpenSim::Millard2012AccelerationMuscle, OpenSim::Millard2012EquilibriumMuscle, OpenSim::ActivationFiberLengthMuscle_Deprecated, and OpenSim::ActivationFiberLengthMuscle.
| void OpenSim::Muscle::setTendonSlackLength | ( | double | tendonSlackLength | ) |
|
protectedvirtual |
|
protected |
|
protected |
|
protected |
|
protected |
to support deprecated muscles
|
protected |
The assumed fixed muscle-width from which the fiber pennation angle is calculated.
|
protected |
|
protected |
|
protected |
 1.8.1.2
1.8.1.2 
