|
OpenSim
OpenSim 3.0
|
|
OpenSim
OpenSim 3.0
|
This is a class that acts as a utility class that contains all of the necessary kinematic equations required to use a fixed width parallelogram pennation model to compute the way the muscle fibers deform as the muscle contracts. More...
#include <MuscleFixedWidthPennationModel.h>
Public Member Functions | |
| MuscleFixedWidthPennationModel (double optimalFiberLength, double optimalPennationAngle, double maximumPennationAngle, std::string &caller) | |
| MuscleFixedWidthPennationModel () | |
| Default constructor. | |
| bool | setOptimalPennationAngle (double aOptimalPennationAngle) |
| bool | setOptimalFiberLength (double aOptimalFiberLength) |
| bool | setMaximumPennationAngle (double aMaximumPennationAngle) |
| double | getMaximumPennationAngle () const |
| double | getMinimumFiberLength () const |
| double | getMinimumFiberLengthAlongTendon () const |
| double | clampFiberLength (double fiberLength) const |
| This function will clamp fiberLength within 0.001*optimalFiberLengths of the minimum fiber length at which singularities occur. | |
| double | getParallelogramHeight () const |
| double | getOptimalFiberLength () const |
| double | getOptimalPennationAngle () const |
| double | calcFiberLengthAlongTendon (double fiberLength, double cosPennationAngle) const |
| double | calc_DFiberLengthAlongTendon_DfiberLength (double fiberLength, double sinPennationAngle, double cosPennationAngle, double DpennationAngle_DfiberLength) const |
| double | calcFiberVelocityAlongTendon (double fiberLength, double fiberVelocity, double sinPennationAngle, double cosPennationAngle, double pennationAngularVelocity) const |
| double | calc_DFiberVelocityAlongTendon_DfiberLength (double fiberLength, double fiberVelocity, double sinPennationAngle, double cosPennationAngle, double pennationAngularVelocity, double DpennationAngle_DfiberLength, double DpennationAngularVelocity_DfiberLength) const |
| double | calc_DPennationAngularVelocity_DfiberLength (double fiberLength, double fiberVelocity, double sinPennationAngle, double cosPennationAngle, double pennationAngularVelocity, double DpennationAngle_DfiberLength, std::string &caller) const |
| double | calcPennationAngle (double fiberLength) const |
| This function calculates the pennation angle of the fiber given its current length. | |
| double | calcPennationAngularVelocity (double tanPennationAngle, double fiberLength, double fiberVelocity, std::string &caller) const |
| This function computes the angular velocity of the fiber. | |
| double | calcPennationAngularAcceleration (double fiberLength, double fiberVelocity, double fiberAcceleration, double sinPennationAngle, double cosPennationAngle, double pennationAngularVelocity, std::string &caller) const |
| double | calcFiberAccelerationAlongTendon (double fiberLength, double fiberVelocity, double fiberAcceleration, double sinPennationAngle, double cosPennationAngle, double pennationAngularVelocity, double pennationAngularAcceleration) const |
| double | calcTendonLength (double cosPennationAngle, double fiberLength, double muscleLength) const |
| This function computes the length of the tendon given the length of the muscle, the length of the fiber, and the current pennation angle. | |
| double | calcTendonVelocity (double cosPennationAngle, double sinPennationAngle, double pennationAngularVelocity, double fiberLength, double fiberVelocity, double muscleVelocity) const |
| This function computes the lengthening velocity (or stretch velocity) of the tendon. | |
| double | calc_DPennationAngle_DfiberLength (double fiberLength, std::string &caller) const |
| The partial derivative of the pennation angle with respect to fiber length. | |
| double | calc_DTendonLength_DfiberLength (double fiberLength, double sinPennationAngle, double cosPennationAngle, double DpennationAngle_DfiberLength, std::string &caller) const |
| The partial derivative of tendon length with respect to fiber length. | |
| double | calcFiberLength (double muscleLength, double tendonLength) const |
| double | calcFiberVelocity (double fiberLength, double sinPennationAngle, double cosPennationAngle, double muscleLength, double tendonLength, double muscleVelocity, double tendonVelocity, std::string &caller) const |
Property declarations | |
These are the serializable properties associated with this class. | |
| OpenSim_DECLARE_PROPERTY (optimal_fiber_length, double,"optimal or resting fiber length in units of meters") | |
| OpenSim_DECLARE_PROPERTY (optimal_pennation_angle, double,"pennation angle in radians of a fiber at its optimal length") | |
| OpenSim_DECLARE_PROPERTY (maximum_pennation_angle, double,"maximum pennation angle in radians") | |
 Public Member Functions inherited from OpenSim::Object Public Member Functions inherited from OpenSim::Object | |
| virtual | ~Object () |
| Virtual destructor for cleanup. | |
| virtual Object * | clone () const =0 |
Create a new heap-allocated copy of the concrete object to which this | |
| virtual const std::string & | getConcreteClassName () const =0 |
Returns the class name of the concrete %Object-derived class of the | |
| virtual const VisibleObject * | getDisplayer () const |
| Methods to support making the object displayable in the GUI or Visualizer Implemented only in few objects. | |
| virtual VisibleObject * | updDisplayer () |
| get Non const pointer to VisibleObject | |
| bool | isEqualTo (const Object &aObject) const |
| Equality operator wrapper for use from languages not supporting operator overloading. | |
| Object & | operator= (const Object &aObject) |
Copy assignment copies he base class fields, including the | |
| virtual bool | operator== (const Object &aObject) const |
| Determine if two objects are equal. | |
| virtual bool | operator< (const Object &aObject) const |
Provide an ordering for objects so they can be put in sorted | |
| void | setName (const std::string &name) |
| Set the name of the Object. | |
| const std::string & | getName () const |
| Get the name of this Object. | |
| void | setDescription (const std::string &description) |
| Set description, a one-liner summary. | |
| const std::string & | getDescription () const |
| Get description, a one-liner summary. | |
| const std::string & | getAuthors () const |
| Get Authors of this Object. | |
| void | setAuthors (const std::string &authors) |
| Set Authors of this object, call this method in your constructor if needed. | |
| const std::string & | getReferences () const |
| Get references or publications to cite if using this object. | |
| void | setReferences (const std::string &references) |
| Set references or publications to cite if using this object. | |
| int | getNumProperties () const |
| Determine how many properties are stored with this Object. | |
| const AbstractProperty & | getPropertyByIndex (int propertyIndex) const |
Get a const reference to a property by its index number, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByIndex (int propertyIndex) |
Get a writable reference to a property by its index number, returned as an AbstractProperty. | |
| bool | hasProperty (const std::string &name) const |
Return true if this %Object has a property of any type with the | |
| const AbstractProperty & | getPropertyByName (const std::string &name) const |
Get a const reference to a property by its name, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByName (const std::string &name) |
Get a writable reference to a property by its name, returned as an AbstractProperty. | |
| template<class T > | |
| bool | hasProperty () const |
Return true if this %Object contains an unnamed, one-object property | |
| template<class T > | |
| const Property< T > & | getProperty (const PropertyIndex &index) const |
Get property of known type Property\<T> as a const reference; | |
| template<class T > | |
| Property< T > & | updProperty (const PropertyIndex &index) |
Get property of known type Property\<T> as a writable reference; | |
| void | setObjectIsUpToDateWithProperties () |
When an object is initialized using the current values of its properties, it can set a flag indicating that it is up to date. | |
| bool | isObjectUpToDateWithProperties () const |
Returns \c true if any property's value has changed since the last time setObjectIsUpToDateWithProperties() was called. | |
| void | readObjectFromXMLNodeOrFile (SimTK::Xml::Element &objectElement, int versionNumber) |
| We're given an XML element from which we are to populate this Object. | |
| virtual void | updateFromXMLNode (SimTK::Xml::Element &objectElement, int versionNumber) |
| Use this method to deserialize an object from a SimTK::Xml::Element. | |
| virtual void | updateXMLNode (SimTK::Xml::Element &parent) |
| Serialize this object into the XML node that represents it. | |
| bool | getInlined () const |
Inlined means an in-memory Object that is not associated with an XMLDocument. | |
| void | setInlined (bool aInlined, const std::string &aFileName="") |
Mark this as inlined or not and optionally provide a file name to associate with the new XMLDocument for the non-inline case. | |
| std::string | getDocumentFileName () const |
If there is a document associated with this object then return the | |
| void | setAllPropertiesUseDefault (bool aUseDefault) |
| bool | print (const std::string &fileName) |
Write this %Object into an XML file of the given name; conventionally | |
| std::string | dump (bool dumpName=false) |
| dump the XML representation of this Object into an std::string and return it. | |
| void | clearObjectIsUpToDateWithProperties () |
For testing or debugging purposes, manually clear the "object is up to | |
| virtual bool | isA (const char *type) const |
The default implementation returns true only if the supplied string is "Object"; each Object-derived class overrides this to match its own class name. | |
| const std::string & | toString () const |
Wrapper to be used on Java side to display objects in tree; this returns | |
| PropertySet & | getPropertySet () |
OBSOLETE: Get a reference to the PropertySet maintained by the | |
| const PropertySet & | getPropertySet () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from OpenSim::Object | |
| static void | registerType (const Object &defaultObject) |
Register an instance of a class; if the class is already registered it | |
| static void | renameType (const std::string &oldTypeName, const std::string &newTypeName) |
Support versioning by associating the current %Object type with an | |
| static const Object * | getDefaultInstanceOfType (const std::string &concreteClassName) |
Return a pointer to the default instance of the registered (concrete) Object whose class name is given, or NULL if the type is not registered. | |
| template<class T > | |
| static bool | isObjectTypeDerivedFrom (const std::string &concreteClassName) |
Return true if the given concrete object type represents a subclass of the template object type T, and thus could be referenced with a T*. | |
| static Object * | newInstanceOfType (const std::string &concreteClassName) |
Create a new instance of the concrete %Object type whose class name is | |
| static void | getRegisteredTypenames (Array< std::string > &typeNames) |
| Retrieve all the typenames registered so far. | |
| template<class T > | |
| static void | getRegisteredObjectsOfGivenType (ArrayPtrs< T > &rArray) |
Return an array of pointers to the default instances of all registered (concrete) Object types that derive from a given Object-derived type that does not have to be concrete. | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &classNameDotPropertyName) |
Dump formatted property information to a given output stream, useful | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &className, const std::string &propertyName) |
Same as the other signature but the class name and property name are | |
| static Object * | makeObjectFromFile (const std::string &fileName) |
Create an %OpenSim object whose type is based on the tag at the root | |
| static const std::string & | getClassName () |
| Return the name of this class as a string; i.e., "Object". | |
| static void | setSerializeAllDefaults (bool shouldSerializeDefaults) |
Static function to control whether all registered objects and their properties are written to the defaults section of output files rather than only those values for which the default was explicitly overwritten when read in from an input file or set programmatically. | |
| static bool | getSerializeAllDefaults () |
| Report the value of the "serialize all defaults" flag. | |
| static bool | isKindOf (const char *type) |
Returns true if the passed-in string is "Object"; each %Object-derived | |
| static void | setDebugLevel (int newLevel) |
| Set the debug level to get verbose output. | |
| static int | getDebugLevel () |
| Get current setting of debug level. | |
| static Object * | SafeCopy (const Object *aObject) |
Use the clone() method to duplicate the given object unless the pointer | |
| static void | RegisterType (const Object &defaultObject) |
| OBSOLETE alternate name for registerType(). | |
| static void | RenameType (const std::string &oldName, const std::string &newName) |
| OBSOLETE alternate name for renameType(). | |
| Static Public Attributes inherited from OpenSim::Object | |
| static const std::string | DEFAULT_NAME |
| Name used for default objects when they are serialized. | |
| Protected Member Functions inherited from OpenSim::Object | |
| Object () | |
The default constructor is only for use by constructors of | |
| Object (const std::string &fileName, bool aUpdateFromXMLNode=true) SWIG_DECLARE_EXCEPTION | |
Constructor from a file, to be called from other constructors that | |
| Object (const Object &source) | |
Copy constructor is invoked automatically by derived classes with default copy constructors; otherwise it must be invoked explicitly. | |
| Object (SimTK::Xml::Element &aElement) | |
Construct the base class portion of an %Object from a given Xml element that describes this Object. | |
| template<class T > | |
| PropertyIndex | addProperty (const std::string &name, const std::string &comment, const T &value) |
Define a new single-value property of known type T, with the given | |
| template<class T > | |
| PropertyIndex | addOptionalProperty (const std::string &name, const std::string &comment) |
Add an optional property, meaning it can contain either no value or | |
| template<class T > | |
| PropertyIndex | addOptionalProperty (const std::string &name, const std::string &comment, const T &value) |
Add an optional property, meaning it can contain either no value or | |
| template<class T > | |
| PropertyIndex | addListProperty (const std::string &name, const std::string &comment, int minSize, int maxSize) |
Define a new list-valued property of known type T, with the given name, associated comment, minimum (==0) and maximum (>0) allowable list lengths, and a zero-length initial value. | |
| template<class T , template< class > class Container> | |
| PropertyIndex | addListProperty (const std::string &name, const std::string &comment, int minSize, int maxSize, const Container< T > &valueList) |
Define a new list-valued property as above, but assigning an initial value via some templatized container class that supports size() and indexing. | |
| PropertyIndex | getPropertyIndex (const std::string &name) const |
Look up a property by name and return its PropertyIndex if it is | |
| template<class T > | |
| PropertyIndex | getPropertyIndex () const |
Look up an unnamed property by the type of object it contains, | |
| void | updateFromXMLDocument () |
Use this method only if you're deserializing from a file and the object is at the top level; that is, primarily in constructors that take a file name as input. | |
| void | setDocument (XMLDocument *doc) |
| Unconditionally set the XMLDocument associated with this object. | |
| const XMLDocument * | getDocument () const |
Get a const pointer to the document (if any) associated with this | |
| XMLDocument * | updDocument () |
Get a writable pointer to the document (if any) associated with this | |
| Protected Attributes inherited from OpenSim::Object | |
| PropertySet | _propertySet |
OBSOLETE: Property_Deprecated set for serializable member variables of | |
| Related Functions inherited from OpenSim::Object | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any non-templatized, concrete class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any still-abstract class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, concrete class that derives from OpenSim::Object, like Set<T>. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, still-abstract class that derives from OpenSim::Object. | |
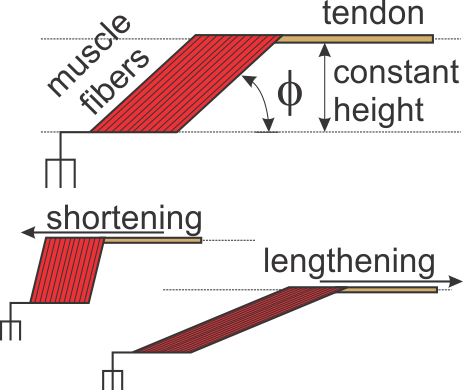
This is a class that acts as a utility class that contains all of the necessary kinematic equations required to use a fixed width parallelogram pennation model to compute the way the muscle fibers deform as the muscle contracts.
A fixed width parallelogram pennation model makes a number of assumptions:
The parallelogram pennation model achieves a constant area by permitting the parallelogram to shear while maintaining a constant height. The constant area property is intended to mimic the constant volume property of muscle, which arises because muscle is incompressible for all practial purposes.
This class has been coded to eliminate duplicate calculations. Thus if a function depends on pennationAngle, or cos(pennationAngle), it will request this quantity rather than re-compute this value itself.
ASSUMPTIONS
1) This pennation model is compatible with muscle models that assume that the effect of the pennation of the fiber on the transmission of force from the fiber to the tendon is multiplicative. That is
fiberForceAlongTendon = fiberForce * f()
Where 'f()' is the function that relates the pennation of the fibers to how much force is transmitted from the fiber to the tendon.
2) This pennation model assumes that fiber length, and whole muscle length are known.
| OpenSim::MuscleFixedWidthPennationModel::MuscleFixedWidthPennationModel | ( | double | optimalFiberLength, |
| double | optimalPennationAngle, | ||
| double | maximumPennationAngle, | ||
| std::string & | caller | ||
| ) |
| optimalFiberLength | The length of the fiber (meters) at its optimal length |
| optimalPennationAngle | The angle of the fiber (radians) when it is at its optimal angle |
| maximumPennationAngle | The maximum pennation angle permitted. This is particularly useful to set for muscle models that have a pennation singularity. For those muscles that do not, this parameter must be greater than SimTK::Pi/2, as a pennation angle of Pi/2 will cause a singularity in several of the internal functions of this class. |
| caller | The name of the function calling this one. This string is used to help the user debug their model when an assertion fails. |
Constructs a ParallelogramPennationModel object, which dictates how the movement of the fiber affects its orientation, and how force is transferred from the fiber to the tendon.
Conditions:
0 < optimalFiberLength
0 <= optimalPennationAngle < SimTK::Pi/2
0 <= maximumPennationAngle < SimTK::Pi/2
Example:
Computational Costs
_______________________________________________________________________
Trig Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
1 2 1
| OpenSim::MuscleFixedWidthPennationModel::MuscleFixedWidthPennationModel | ( | ) |
Default constructor.
Populates member data with NaN's and other obviously wrong values
| double OpenSim::MuscleFixedWidthPennationModel::calc_DFiberLengthAlongTendon_DfiberLength | ( | double | fiberLength, |
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | DpennationAngle_DfiberLength | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| sinPennationAngle | The sine of the pennation angle (unitless) |
| cosPennationAngle | The cosine of the pennation angle (unitless) |
| DpennationAngle_DfiberLength | The partial derivative of the pennation angle with respect to fiber length |
| double OpenSim::MuscleFixedWidthPennationModel::calc_DFiberVelocityAlongTendon_DfiberLength | ( | double | fiberLength, |
| double | fiberVelocity, | ||
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | pennationAngularVelocity, | ||
| double | DpennationAngle_DfiberLength, | ||
| double | DpennationAngularVelocity_DfiberLength | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| fiberVelocity | The stretch velocity of the fiber (meters/s) |
| sinPennationAngle | The sine of the pennation angle (unitless) |
| cosPennationAngle | The cosine of the pennation angle (unitless) |
| pennationAngularVelocity | The angular velocity of the pennation angle. |
| DpennationAngle_DfiberLength | The partial derivative of the pennation angle with respect to fiber length |
| DpennationAngularVelocity_DfiberLength | The partial derivative of the pennation angular velocity w.r.t. fiber length |
Example:
Computational Costs
_______________________________________________________________________
Trig Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
0 2 3 14 6 10
| double OpenSim::MuscleFixedWidthPennationModel::calc_DPennationAngle_DfiberLength | ( | double | fiberLength, |
| std::string & | caller | ||
| ) | const |
The partial derivative of the pennation angle with respect to fiber length.
| fiberLength | The length of the fiber (meters) |
| caller | The name of the function calling this one. This string is used to help the user debug their model when an assertion fails. |
Conditions:
parallelogramHeight < fiberLength
Example:
Computational Costs
_______________________________________________________________________
Sqrt Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
1 2 2 5 1 5
| double OpenSim::MuscleFixedWidthPennationModel::calc_DPennationAngularVelocity_DfiberLength | ( | double | fiberLength, |
| double | fiberVelocity, | ||
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | pennationAngularVelocity, | ||
| double | DpennationAngle_DfiberLength, | ||
| std::string & | caller | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| fiberVelocity | The stretch velocity of the fiber (meters/s) |
| sinPennationAngle | The sine of the pennation angle (unitless) |
| cosPennationAngle | The cosine of the pennation angle (unitless) |
| pennationAngularVelocity | The angular velocity of the pennation angle. |
| DpennationAngle_DfiberLength | The partial derivative of the pennation angle with respect to fiber length |
| caller | The name of the function calling this one. This string is used to help the user debug their model when an assertion fails. |
Conditions:
0 < fiberLength
pennationAngle < 90 degrees
| double OpenSim::MuscleFixedWidthPennationModel::calc_DTendonLength_DfiberLength | ( | double | fiberLength, |
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | DpennationAngle_DfiberLength, | ||
| std::string & | caller | ||
| ) | const |
The partial derivative of tendon length with respect to fiber length.
| fiberLength | The length of the fiber (meters) |
| sinPennationAngle | The sin(pennationAngle) |
| cosPennationAngle | The cos(pennationAngle) |
| DpennationAngle_DfiberLength | The partial derivative of pennation angle w.r.t. fiber length (rad/m) |
| caller | The name of the function calling this one. This string is used to help the user debug their model when an assertion fails. |
Conditions:
0 < fiberLength
parallelogramHeight < fiberLength
Example:
Computational Costs
_______________________________________________________________________
Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
2 2 1 1
| double OpenSim::MuscleFixedWidthPennationModel::calcFiberAccelerationAlongTendon | ( | double | fiberLength, |
| double | fiberVelocity, | ||
| double | fiberAcceleration, | ||
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | pennationAngularVelocity, | ||
| double | pennationAngularAcceleration | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| fiberVelocity | The stretch velocity of the fiber (meters/s) |
| fiberAcceleration | The stretch acceleration of the fiber (meters/s^2) |
| sinPennationAngle | The sine of the pennation angle (unitless) |
| cosPennationAngle | The cosine of the pennation angle (unitless) |
| pennationAngularVelocity | The angular velocity of the pennation angle. |
| pennationAngularAcceleration | the angular acceleration of the pennation angle (rad/s^2) |
| double OpenSim::MuscleFixedWidthPennationModel::calcFiberLength | ( | double | muscleLength, |
| double | tendonLength | ||
| ) | const |
| muscleLength | the length of the musculo tendon (meters) |
| tendonLength | the length of the tendon (meters |
| double OpenSim::MuscleFixedWidthPennationModel::calcFiberLengthAlongTendon | ( | double | fiberLength, |
| double | cosPennationAngle | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| cosPennationAngle | The cosine of the pennation angle (unitless) |
| double OpenSim::MuscleFixedWidthPennationModel::calcFiberVelocity | ( | double | fiberLength, |
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | muscleLength, | ||
| double | tendonLength, | ||
| double | muscleVelocity, | ||
| double | tendonVelocity, | ||
| std::string & | caller | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| sinPennationAngle | The sin(pennationAngle) |
| cosPennationAngle | The cos(pennationAngle) |
| muscleLength | The length of the muscle (meters) |
| tendonLength | The length of the tendon (meters) |
| muscleVelocity | The lengthening velocity of the muscle (meters/s) |
| tendonVelocity | The lengening velocity of the tendon (meters/s) |
| caller | The name of the function calling this one. This string is used to help the user debug their model when an assertion fails. |
| double OpenSim::MuscleFixedWidthPennationModel::calcFiberVelocityAlongTendon | ( | double | fiberLength, |
| double | fiberVelocity, | ||
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | pennationAngularVelocity | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| fiberVelocity | The stretch velocity of the fiber (meters/s) |
| sinPennationAngle | The sine of the pennation angle (unitless) |
| cosPennationAngle | The cosine of the pennation angle (unitless) |
| pennationAngularVelocity | The angular velocity of the pennation angle. |
| double OpenSim::MuscleFixedWidthPennationModel::calcPennationAngle | ( | double | fiberLength | ) | const |
This function calculates the pennation angle of the fiber given its current length.
The pennation angle is saturated at SimTK::Pi/2 for fiber lengths that are less than, or equal to, the minimum physical fiber length for this pennation model.
| fiberLength | the length of the fiber (meters) |
Example:
Computational Costs
_______________________________________________________________________
Trig Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
1 2 1 1 2
| double OpenSim::MuscleFixedWidthPennationModel::calcPennationAngularAcceleration | ( | double | fiberLength, |
| double | fiberVelocity, | ||
| double | fiberAcceleration, | ||
| double | sinPennationAngle, | ||
| double | cosPennationAngle, | ||
| double | pennationAngularVelocity, | ||
| std::string & | caller | ||
| ) | const |
| fiberLength | The length of the fiber (meters) |
| fiberVelocity | The stretch velocity of the fiber (meters/s) |
| fiberAcceleration | The stretch acceleration of the fiber (meters/s^2) |
| sinPennationAngle | The sine of the pennation angle (unitless) |
| cosPennationAngle | The cosine of the pennation angle (unitless) |
| pennationAngularVelocity | The angular velocity of the pennation angle. |
| caller | The name of the function calling this one. This string is used to help the user debug their model when an assertion fails. |
| double OpenSim::MuscleFixedWidthPennationModel::calcPennationAngularVelocity | ( | double | tanPennationAngle, |
| double | fiberLength, | ||
| double | fiberVelocity, | ||
| std::string & | caller | ||
| ) | const |
This function computes the angular velocity of the fiber.
| tanPennationAngle | The result of tan(pennationAngle) |
| fiberLength | The length of the fiber (meters) |
| fiberVelocity | The lengthening/shortening velocity of the fiber in (meters/sec) |
| caller | The name of the function calling this one. This string is used to help the user debug their model when an assertion fails. |
Conditions:
0 < fiberLength
Example:
Computational Costs
_______________________________________________________________________
Trig Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
1 1 1 1
| double OpenSim::MuscleFixedWidthPennationModel::calcTendonLength | ( | double | cosPennationAngle, |
| double | fiberLength, | ||
| double | muscleLength | ||
| ) | const |
This function computes the length of the tendon given the length of the muscle, the length of the fiber, and the current pennation angle.
| cosPennationAngle | The cosine of the current pennation angle |
| fiberLength | The length of the fiber (meters) |
| muscleLength | The length of the whole muscle (meters) |
Example:
Computational Costs
_______________________________________________________________________
Trig Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
1 1 1
| double OpenSim::MuscleFixedWidthPennationModel::calcTendonVelocity | ( | double | cosPennationAngle, |
| double | sinPennationAngle, | ||
| double | pennationAngularVelocity, | ||
| double | fiberLength, | ||
| double | fiberVelocity, | ||
| double | muscleVelocity | ||
| ) | const |
This function computes the lengthening velocity (or stretch velocity) of the tendon.
| cosPennationAngle | The cosine of the current pennation angle |
| sinPennationAngle | The sine of the current pennation angle |
| pennationAngularVelocity | The angular velocity of the fiber (rad/s) |
| fiberLength | The length of the fiber (meters) |
| fiberVelocity | The lengthening/shortening velocity of the fiber (m/s) |
| muscleVelocity | The lengthening/shortening velocity of the path the of the muscle (m/s) |
Example:
Computational Costs
_______________________________________________________________________
Trig Comp. Div. Mult. Add. Assign.
_______________________________________________________________________
3 2 1
| double OpenSim::MuscleFixedWidthPennationModel::clampFiberLength | ( | double | fiberLength | ) | const |
This function will clamp fiberLength within 0.001*optimalFiberLengths of the minimum fiber length at which singularities occur.
| fiberLength | is the length of the fiber in meters |
| double OpenSim::MuscleFixedWidthPennationModel::getMaximumPennationAngle | ( | ) | const |
| double OpenSim::MuscleFixedWidthPennationModel::getMinimumFiberLength | ( | ) | const |
| double OpenSim::MuscleFixedWidthPennationModel::getMinimumFiberLengthAlongTendon | ( | ) | const |
| double OpenSim::MuscleFixedWidthPennationModel::getOptimalFiberLength | ( | ) | const |
| double OpenSim::MuscleFixedWidthPennationModel::getOptimalPennationAngle | ( | ) | const |
| double OpenSim::MuscleFixedWidthPennationModel::getParallelogramHeight | ( | ) | const |
| OpenSim::MuscleFixedWidthPennationModel::OpenSim_DECLARE_PROPERTY | ( | optimal_fiber_length | , |
| double | , | ||
| "optimal or resting fiber length in units of meters" | |||
| ) |
| OpenSim::MuscleFixedWidthPennationModel::OpenSim_DECLARE_PROPERTY | ( | optimal_pennation_angle | , |
| double | , | ||
| "pennation angle in radians of a fiber at its optimal length" | |||
| ) |
| OpenSim::MuscleFixedWidthPennationModel::OpenSim_DECLARE_PROPERTY | ( | maximum_pennation_angle | , |
| double | , | ||
| "maximum pennation angle in radians" | |||
| ) |
| bool OpenSim::MuscleFixedWidthPennationModel::setMaximumPennationAngle | ( | double | aMaximumPennationAngle | ) |
| bool OpenSim::MuscleFixedWidthPennationModel::setOptimalFiberLength | ( | double | aOptimalFiberLength | ) |
| bool OpenSim::MuscleFixedWidthPennationModel::setOptimalPennationAngle | ( | double | aOptimalPennationAngle | ) |
 1.8.1.2
1.8.1.2 
