|
OpenSim
OpenSim 3.0
|
|
OpenSim
OpenSim 3.0
|
This function is a muscle modeling utility class that computes the derivative of activation with respect to time time using a modification of the activation model presented in Thelen 2003. More...
#include <MuscleFirstOrderActivationDynamicModel.h>
Public Member Functions | |
| MuscleFirstOrderActivationDynamicModel (double tauActivation, double tauDeactivation, double minActivation, const std::string &muscleName) | |
| MuscleFirstOrderActivationDynamicModel () | |
| Default constructor. | |
| double | calcDerivative (double activation, double excitation) const |
| double | getActivationTimeConstant () const |
| double | getDeactivationTimeConstant () const |
| double | getMinimumActivation () const |
| double | getMaximumActivation () const |
| double | clampActivation (double activation) const |
| bool | setActivationTimeConstant (double activationTimeConstant) |
| bool | setDeactivationTimeConstant (double deactivationTimeConstant) |
| bool | setMinimumActivation (double minimumActivation) |
Property declarations | |
These are the serializable properties associated with this class. | |
| OpenSim_DECLARE_PROPERTY (activation_time_constant, double,"activation time constant in seconds") | |
| OpenSim_DECLARE_PROPERTY (deactivation_time_constant, double,"deactivation time constant in seconds") | |
| OpenSim_DECLARE_PROPERTY (minimum_activation, double,"activation lower bound") | |
 Public Member Functions inherited from OpenSim::Object Public Member Functions inherited from OpenSim::Object | |
| virtual | ~Object () |
| Virtual destructor for cleanup. | |
| virtual Object * | clone () const =0 |
Create a new heap-allocated copy of the concrete object to which this | |
| virtual const std::string & | getConcreteClassName () const =0 |
Returns the class name of the concrete %Object-derived class of the | |
| virtual const VisibleObject * | getDisplayer () const |
| Methods to support making the object displayable in the GUI or Visualizer Implemented only in few objects. | |
| virtual VisibleObject * | updDisplayer () |
| get Non const pointer to VisibleObject | |
| bool | isEqualTo (const Object &aObject) const |
| Equality operator wrapper for use from languages not supporting operator overloading. | |
| Object & | operator= (const Object &aObject) |
Copy assignment copies he base class fields, including the | |
| virtual bool | operator== (const Object &aObject) const |
| Determine if two objects are equal. | |
| virtual bool | operator< (const Object &aObject) const |
Provide an ordering for objects so they can be put in sorted | |
| void | setName (const std::string &name) |
| Set the name of the Object. | |
| const std::string & | getName () const |
| Get the name of this Object. | |
| void | setDescription (const std::string &description) |
| Set description, a one-liner summary. | |
| const std::string & | getDescription () const |
| Get description, a one-liner summary. | |
| const std::string & | getAuthors () const |
| Get Authors of this Object. | |
| void | setAuthors (const std::string &authors) |
| Set Authors of this object, call this method in your constructor if needed. | |
| const std::string & | getReferences () const |
| Get references or publications to cite if using this object. | |
| void | setReferences (const std::string &references) |
| Set references or publications to cite if using this object. | |
| int | getNumProperties () const |
| Determine how many properties are stored with this Object. | |
| const AbstractProperty & | getPropertyByIndex (int propertyIndex) const |
Get a const reference to a property by its index number, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByIndex (int propertyIndex) |
Get a writable reference to a property by its index number, returned as an AbstractProperty. | |
| bool | hasProperty (const std::string &name) const |
Return true if this %Object has a property of any type with the | |
| const AbstractProperty & | getPropertyByName (const std::string &name) const |
Get a const reference to a property by its name, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByName (const std::string &name) |
Get a writable reference to a property by its name, returned as an AbstractProperty. | |
| template<class T > | |
| bool | hasProperty () const |
Return true if this %Object contains an unnamed, one-object property | |
| template<class T > | |
| const Property< T > & | getProperty (const PropertyIndex &index) const |
Get property of known type Property\<T> as a const reference; | |
| template<class T > | |
| Property< T > & | updProperty (const PropertyIndex &index) |
Get property of known type Property\<T> as a writable reference; | |
| void | setObjectIsUpToDateWithProperties () |
When an object is initialized using the current values of its properties, it can set a flag indicating that it is up to date. | |
| bool | isObjectUpToDateWithProperties () const |
Returns \c true if any property's value has changed since the last time setObjectIsUpToDateWithProperties() was called. | |
| void | readObjectFromXMLNodeOrFile (SimTK::Xml::Element &objectElement, int versionNumber) |
| We're given an XML element from which we are to populate this Object. | |
| virtual void | updateFromXMLNode (SimTK::Xml::Element &objectElement, int versionNumber) |
| Use this method to deserialize an object from a SimTK::Xml::Element. | |
| virtual void | updateXMLNode (SimTK::Xml::Element &parent) |
| Serialize this object into the XML node that represents it. | |
| bool | getInlined () const |
Inlined means an in-memory Object that is not associated with an XMLDocument. | |
| void | setInlined (bool aInlined, const std::string &aFileName="") |
Mark this as inlined or not and optionally provide a file name to associate with the new XMLDocument for the non-inline case. | |
| std::string | getDocumentFileName () const |
If there is a document associated with this object then return the | |
| void | setAllPropertiesUseDefault (bool aUseDefault) |
| bool | print (const std::string &fileName) |
Write this %Object into an XML file of the given name; conventionally | |
| std::string | dump (bool dumpName=false) |
| dump the XML representation of this Object into an std::string and return it. | |
| void | clearObjectIsUpToDateWithProperties () |
For testing or debugging purposes, manually clear the "object is up to | |
| virtual bool | isA (const char *type) const |
The default implementation returns true only if the supplied string is "Object"; each Object-derived class overrides this to match its own class name. | |
| const std::string & | toString () const |
Wrapper to be used on Java side to display objects in tree; this returns | |
| PropertySet & | getPropertySet () |
OBSOLETE: Get a reference to the PropertySet maintained by the | |
| const PropertySet & | getPropertySet () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from OpenSim::Object | |
| static void | registerType (const Object &defaultObject) |
Register an instance of a class; if the class is already registered it | |
| static void | renameType (const std::string &oldTypeName, const std::string &newTypeName) |
Support versioning by associating the current %Object type with an | |
| static const Object * | getDefaultInstanceOfType (const std::string &concreteClassName) |
Return a pointer to the default instance of the registered (concrete) Object whose class name is given, or NULL if the type is not registered. | |
| template<class T > | |
| static bool | isObjectTypeDerivedFrom (const std::string &concreteClassName) |
Return true if the given concrete object type represents a subclass of the template object type T, and thus could be referenced with a T*. | |
| static Object * | newInstanceOfType (const std::string &concreteClassName) |
Create a new instance of the concrete %Object type whose class name is | |
| static void | getRegisteredTypenames (Array< std::string > &typeNames) |
| Retrieve all the typenames registered so far. | |
| template<class T > | |
| static void | getRegisteredObjectsOfGivenType (ArrayPtrs< T > &rArray) |
Return an array of pointers to the default instances of all registered (concrete) Object types that derive from a given Object-derived type that does not have to be concrete. | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &classNameDotPropertyName) |
Dump formatted property information to a given output stream, useful | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &className, const std::string &propertyName) |
Same as the other signature but the class name and property name are | |
| static Object * | makeObjectFromFile (const std::string &fileName) |
Create an %OpenSim object whose type is based on the tag at the root | |
| static const std::string & | getClassName () |
| Return the name of this class as a string; i.e., "Object". | |
| static void | setSerializeAllDefaults (bool shouldSerializeDefaults) |
Static function to control whether all registered objects and their properties are written to the defaults section of output files rather than only those values for which the default was explicitly overwritten when read in from an input file or set programmatically. | |
| static bool | getSerializeAllDefaults () |
| Report the value of the "serialize all defaults" flag. | |
| static bool | isKindOf (const char *type) |
Returns true if the passed-in string is "Object"; each %Object-derived | |
| static void | setDebugLevel (int newLevel) |
| Set the debug level to get verbose output. | |
| static int | getDebugLevel () |
| Get current setting of debug level. | |
| static Object * | SafeCopy (const Object *aObject) |
Use the clone() method to duplicate the given object unless the pointer | |
| static void | RegisterType (const Object &defaultObject) |
| OBSOLETE alternate name for registerType(). | |
| static void | RenameType (const std::string &oldName, const std::string &newName) |
| OBSOLETE alternate name for renameType(). | |
| Static Public Attributes inherited from OpenSim::Object | |
| static const std::string | DEFAULT_NAME |
| Name used for default objects when they are serialized. | |
| Protected Member Functions inherited from OpenSim::Object | |
| Object () | |
The default constructor is only for use by constructors of | |
| Object (const std::string &fileName, bool aUpdateFromXMLNode=true) SWIG_DECLARE_EXCEPTION | |
Constructor from a file, to be called from other constructors that | |
| Object (const Object &source) | |
Copy constructor is invoked automatically by derived classes with default copy constructors; otherwise it must be invoked explicitly. | |
| Object (SimTK::Xml::Element &aElement) | |
Construct the base class portion of an %Object from a given Xml element that describes this Object. | |
| template<class T > | |
| PropertyIndex | addProperty (const std::string &name, const std::string &comment, const T &value) |
Define a new single-value property of known type T, with the given | |
| template<class T > | |
| PropertyIndex | addOptionalProperty (const std::string &name, const std::string &comment) |
Add an optional property, meaning it can contain either no value or | |
| template<class T > | |
| PropertyIndex | addOptionalProperty (const std::string &name, const std::string &comment, const T &value) |
Add an optional property, meaning it can contain either no value or | |
| template<class T > | |
| PropertyIndex | addListProperty (const std::string &name, const std::string &comment, int minSize, int maxSize) |
Define a new list-valued property of known type T, with the given name, associated comment, minimum (==0) and maximum (>0) allowable list lengths, and a zero-length initial value. | |
| template<class T , template< class > class Container> | |
| PropertyIndex | addListProperty (const std::string &name, const std::string &comment, int minSize, int maxSize, const Container< T > &valueList) |
Define a new list-valued property as above, but assigning an initial value via some templatized container class that supports size() and indexing. | |
| PropertyIndex | getPropertyIndex (const std::string &name) const |
Look up a property by name and return its PropertyIndex if it is | |
| template<class T > | |
| PropertyIndex | getPropertyIndex () const |
Look up an unnamed property by the type of object it contains, | |
| void | updateFromXMLDocument () |
Use this method only if you're deserializing from a file and the object is at the top level; that is, primarily in constructors that take a file name as input. | |
| void | setDocument (XMLDocument *doc) |
| Unconditionally set the XMLDocument associated with this object. | |
| const XMLDocument * | getDocument () const |
Get a const pointer to the document (if any) associated with this | |
| XMLDocument * | updDocument () |
Get a writable pointer to the document (if any) associated with this | |
| Protected Attributes inherited from OpenSim::Object | |
| PropertySet | _propertySet |
OBSOLETE: Property_Deprecated set for serializable member variables of | |
| Related Functions inherited from OpenSim::Object | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any non-templatized, concrete class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any still-abstract class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, concrete class that derives from OpenSim::Object, like Set<T>. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, still-abstract class that derives from OpenSim::Object. | |
This function is a muscle modeling utility class that computes the derivative of activation with respect to time time using a modification of the activation model presented in Thelen 2003.
The activation model presented by Thelen in Eqns. 1 and 2 in the Appendix closely follows the activation dynamic model found in Winters 1995 (Eqn. 2, line 2, Eqn 3) where the time derivative of activation (da/dt) is equal to the difference between excitation (u) and activation (a) scaled by a variable time-constant (tau(a,u)).
da/dt = (u-a)/tau(a,u) (1)
The primary difference between the activation model presented by Thelen and the one presented by Winters lies in the expression for tau(a,u), which differ only in the values for the constant terms within the braces:
t_act *(0.5+1.5*a) : u > a (2)
tau(a,u) = {
t_dact/(0.5+1.5*a) : u <= a (3)
This model for activation dynamics presented in Eqn. 1 notably does not respect a lower bound for activation. Equilibrium muscle models (used ubiquituously to model muscle in lumped parameter musculoskeletal simulations) have a singularity in their state equations when activation goes to zero, making the above activation dynamic model unsuitable for simulating using equilibrium muscle models.
Equation 1 can be made to respect a lower bond on activation by introducing a lower bound, amin, scaling activation to range from amin to 1
aS = a/(1-amin) (4)
aminS = amin/(1-amin) (5)
, adjusting the calculation for the time constant to use the scaled activation
t_act *(0.5+1.5*(aS-aminS)) : u > aS-asminS (6)
tau(a,u,asmin) = {
t_dact/(0.5+1.5*(aS-aminS)) : u <= aS-asminS (7)
and finally updating the final expression for the derivative of activation
da/dt = (u-(aS-aminS))/tau(a,u,amin) (8)
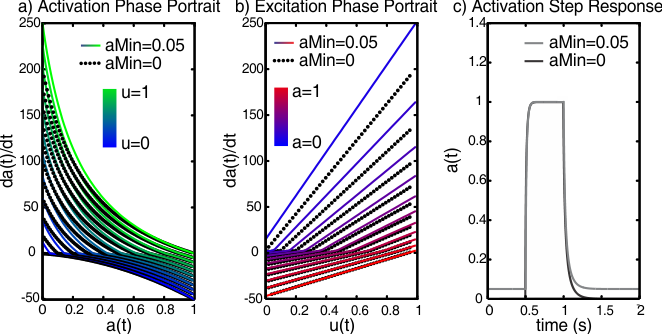
The phase portraits of this system with an aMin>0 is very similar to that of the activation dynamics equations that Thelen presented (which result when aMin=0), though there are differences: the left two panels of the figure below shows a phase portrait of the Thelen activation model (dotted lines) against one with a lower bound of 0.05, which are slightly different. The step response of this model is also very similar, however, there are differences between the Thelen activation model (shown in the figure below on the right panel in balc) and one with a lower bound of 0.05 (shown in green), particularly when the activation level approaches the minimum value. All plots were generated with an activation time constant of 0.010s and a deactivation time constant of 0.040s.
The step response of the Thelen activation function and the modified version are also shown below. Note that due to the nonlinear nature of the state equations, the time activation and deactivation time constants do not relate directly to the rise and fall time of the step response. The 10%-90% rise time of both models is virtually identical: 30ms from 10%-90%, and then 86ms from 90%-10%. Dividing these times by the rising and falling time constants respectively yields a rise time of 3*t_act, and 2.17*t_dact.
References
Thelen, DG.(2003), Adjustment of Muscle Mechanics Model Parameters to Simulate Dynamic Contractions in Older Adults. ASME Journal of Biomechanical Engineering (125).
Winters, JM (1995). An Improved Muscle-Reflex Actuator for Use in Large-Scale Neuromusculoskeletal Models. Annals of Biomedical Engineering (25), pp. 359-374.
Computational Cost Details All computational costs assume the following operation costs:
Operation Type : #flops
+,-,=,Boolean Op : 1
/ : 10
sqrt: 20
trig: 40
| OpenSim::MuscleFirstOrderActivationDynamicModel::MuscleFirstOrderActivationDynamicModel | ( | double | tauActivation, |
| double | tauDeactivation, | ||
| double | minActivation, | ||
| const std::string & | muscleName | ||
| ) |
| tauActivation | The first order time constant associated with a muscle that is being activated (units of seconds) A typical value is 0.010, or 10 ms. |
| tauDeactivation | The first order time constant associated with a muscle that is turning off, or being deactivated (units of seconds). A typical value is 0.040 or 40 ms. |
| minActivation | The minimum activation allowed. Equilibrium muscle models might set this value to be between 0.01-0.1, as they have a singularity when a = 0. Muscle models that don't have a singularity at a=0 will set minActivation to be 0. (Unitless). |
| muscleName | The name of the muscle that this activation object belongs to. This string is used to create useful exception messages. |
Conditions
0 < tauActivation
0 < tauDeactivation
0 <= minActivation < 1
Computational Cost
~15 flops
| OpenSim::MuscleFirstOrderActivationDynamicModel::MuscleFirstOrderActivationDynamicModel | ( | ) |
Default constructor.
Sets data members to NAN and other error causing values
| double OpenSim::MuscleFirstOrderActivationDynamicModel::calcDerivative | ( | double | activation, |
| double | excitation | ||
| ) | const |
| excitation | The excitation signal being sent to the muscle (Unitless, [0,1]) |
| activation | The current activation of the muscle(Unitless [0,1]) |
Conditions
0 <= excitation <= 1
Computational Cost
~40 flops
| double OpenSim::MuscleFirstOrderActivationDynamicModel::clampActivation | ( | double | activation | ) | const |
~2 flops
| double OpenSim::MuscleFirstOrderActivationDynamicModel::getActivationTimeConstant | ( | ) | const |
Computational Cost
~1 flops
| double OpenSim::MuscleFirstOrderActivationDynamicModel::getDeactivationTimeConstant | ( | ) | const |
Computational Cost
~1 flops
| double OpenSim::MuscleFirstOrderActivationDynamicModel::getMaximumActivation | ( | ) | const |
Computational Cost
~1 flops
| double OpenSim::MuscleFirstOrderActivationDynamicModel::getMinimumActivation | ( | ) | const |
Computational Cost
~1 flops
| OpenSim::MuscleFirstOrderActivationDynamicModel::OpenSim_DECLARE_PROPERTY | ( | activation_time_constant | , |
| double | , | ||
| "activation time constant in seconds" | |||
| ) |
| OpenSim::MuscleFirstOrderActivationDynamicModel::OpenSim_DECLARE_PROPERTY | ( | deactivation_time_constant | , |
| double | , | ||
| "deactivation time constant in seconds" | |||
| ) |
| OpenSim::MuscleFirstOrderActivationDynamicModel::OpenSim_DECLARE_PROPERTY | ( | minimum_activation | , |
| double | , | ||
| "activation lower bound" | |||
| ) |
| bool OpenSim::MuscleFirstOrderActivationDynamicModel::setActivationTimeConstant | ( | double | activationTimeConstant | ) |
| activationTimeConstant | The activation time constant in units of seconds |
Computational Cost
~1 flops
| bool OpenSim::MuscleFirstOrderActivationDynamicModel::setDeactivationTimeConstant | ( | double | deactivationTimeConstant | ) |
| deactivationTimeConstant | The deactivation time constant in units of seconds |
Computational Cost
~1 flops
| bool OpenSim::MuscleFirstOrderActivationDynamicModel::setMinimumActivation | ( | double | minimumActivation | ) |
Computational Cost
~1 flops
 1.8.1.2
1.8.1.2 
