|
Simbody
|
|
Simbody
|
This is a subclass of Constraint::Custom which uses a Function to prescribe the behavior of a single generalized coordinate as a function of time. More...
#include <Constraint.h>
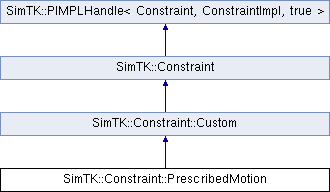
 Inheritance diagram for SimTK::Constraint::PrescribedMotion:
Inheritance diagram for SimTK::Constraint::PrescribedMotion:Public Member Functions | |
| PrescribedMotion (SimbodyMatterSubsystem &matter, const Function *function, MobilizedBodyIndex coordBody, MobilizerQIndex coordIndex) | |
| Create a PrescribedMotion constraint. | |
This is a subclass of Constraint::Custom which uses a Function to prescribe the behavior of a single generalized coordinate as a function of time.
You provide a Function which takes the current time as its argument and returns the required value of the generalized coordinate. It also must support derivatives up to second order.
| SimTK::Constraint::PrescribedMotion::PrescribedMotion | ( | SimbodyMatterSubsystem & | matter, |
| const Function * | function, | ||
| MobilizedBodyIndex | coordBody, | ||
| MobilizerQIndex | coordIndex | ||
| ) |
Create a PrescribedMotion constraint.
You specify a Function that takes time as its single argument, and returns the required value for the constrained coordinate.
| matter | the matter subsystem this constraint will be added to |
| function | the Function which specifies the value of the constrained coordinate. The constraint takes over ownership of this object, and automatically deletes it when the constraint is deleted. |
| coordBody | the MobilizedBody corresponding to the generalized coordinate which will be constrained |
| coordIndex | the index of the generalized coordinate which will be constrained |
 1.7.3
1.7.3