This provides a spherical joint for articulated body dynamics. More...
#include <taoJoint.h>
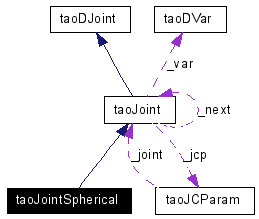
Inheritance diagram for taoJointSpherical:
Public Member Functions | |
| taoJointSpherical () | |
| virtual deInt | getDOF () |
| virtual void | reset () |
| virtual taoVarSpherical * | getVarSpherical () |
| virtual void | addQdelta () |
| virtual void | addDQdelta () |
| virtual void | zeroTau () |
| virtual void | setTau (const deFloat *v) |
| virtual void | setDDQ (const deFloat *v) |
| virtual void | setDQ (const deFloat *v) |
| virtual void | setQ (const deFloat *v) |
| virtual void | getTau (deFloat *v) |
| virtual void | getDDQ (deFloat *v) |
| virtual void | getDQ (deFloat *v) |
| virtual void | getQ (deFloat *v) |
| virtual void | clampDQ () |
| virtual void | integrate (const deFloat dt) |
| virtual void | updateFrameLocal (deFrame *local) |
| virtual deMatrix3 * | getJg () |
This provides a spherical joint for articulated body dynamics.
|
|
|
|
|
Implements taoDJoint. |
|
|
Implements taoDJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
|
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
|
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoJoint. |
|
|
Implements taoDJoint. |
 1.4.6-NO
1.4.6-NO