This implements taoDNode for articulated body dynamics. More...
#include <taoNode.h>
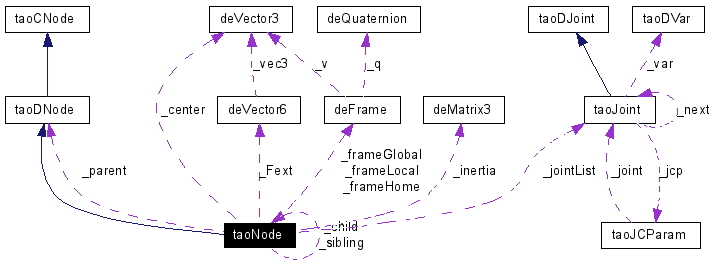
Inheritance diagram for taoNode:
Public Member Functions | |
| taoNode () | |
| taoNode (taoDNode *parent, deFrame *home) | |
| virtual | ~taoNode () |
| virtual void | sync (deFrame *local) |
| virtual taoJoint * | getJointList () |
| virtual deVector6 * | velocity () |
| virtual deVector6 * | acceleration () |
| virtual void | getFrameGraphics (deFrame *Tog) |
| global frame for graphics display | |
| virtual deFrame * | frameHome () |
| virtual deFrame * | frameLocal () |
| virtual deFrame * | frameGlobal () |
| global frame for the dynamics computation | |
| virtual deFloat * | mass () |
| virtual deVector3 * | center () |
| virtual deMatrix3 * | inertia () |
| virtual deVector6 * | force () |
| virtual void | zeroForce () |
| virtual void | addForce (const deVector6 *f) |
| virtual void | updateFrame () |
| virtual void | integrate (deFloat dt) |
| virtual void | setDParent (taoDNode *n) |
| virtual taoDNode * | getDParent () |
| virtual void | setDChild (taoDNode *n) |
| virtual taoDNode * | getDChild () |
| virtual void | setDSibling (taoDNode *n) |
| virtual taoDNode * | getDSibling () |
| virtual void | addJoint (taoJoint *joint) |
| virtual void | addABNode () |
| virtual void | unlink () |
| virtual void | link (taoDNode *parent, deFrame *home) |
| virtual void | deleteJointABNode () |
| virtual void | linearVelocity (deVector3 *Vie, const deVector3 *Pie) |
| virtual void | linearAcceleration (deVector3 *Aie, const deVector3 *Pie) |
| virtual void | impulse (const deVector3 *Pie, const deVector3 *Yie) |
| computes new velocity given impulse | |
| virtual void | impulseDist (const deVector3 *Pie, const deVector3 *Yie) |
| computes new position given pseudo impulse | |
| virtual void | force (const deVector3 *Pie, const deVector3 *Fie) |
| computes new force given force | |
This implements taoDNode for articulated body dynamics.
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
Implements taoDNode. |
|
|
|
|
|
Implements taoDNode. |
|
|
|
|
|
Implements taoDNode. |
|
|
|
|
||||||||||||
|
computes new force given force This method replaces the accumulated force with the given force.
Reimplemented from taoCNode. |
|
|
Implements taoDNode. |
|
|
global frame for the dynamics computation
Implements taoCNode. |
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
|
|
global frame for graphics display
Implements taoCNode. |
|
|
Implements taoDNode. |
|
||||||||||||
|
computes new velocity given impulse This method changes velocity instantaneously by applying the given impulse.
Reimplemented from taoCNode. |
|
||||||||||||
|
computes new position given pseudo impulse This method changes position and orientation instantaneously by applying the given pseudo impulse.
Reimplemented from taoCNode. |
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
|
||||||||||||
|
Reimplemented from taoCNode. |
|
||||||||||||
|
Reimplemented from taoCNode. |
|
||||||||||||
|
|
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
|
|
|
|
|
|
|
|
Implements taoDNode. |
|
|
|
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
|
|
Implements taoDNode. |
 1.4.6-NO
1.4.6-NO