This provides a joint space dynamics controller. More...
#include <taoControlJt.h>
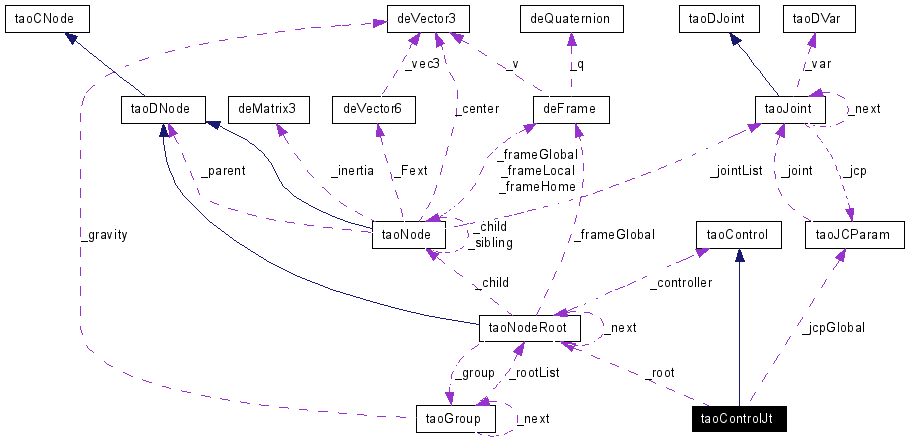
Inheritance diagram for taoControlJt:
Public Member Functions | |
| taoControlJt (taoNodeRoot *root) | |
| virtual | ~taoControlJt () |
| virtual void | deleteParamTree (taoDNode *node) |
| virtual deFloat | time () |
| virtual void | reset (deFloat time) |
| virtual void | control (deFloat time) |
| virtual void | setGoalPosition (taoDNode *node, deFrame *F, deFloat timestamp) |
This methode extracts out and sets appropriate joint goal position exiting in node. | |
| virtual taoControlJt * | getControlJt () |
| virtual taoJCParam * | createJCParam (taoJoint *joint) |
| virtual void | jointForceTree (taoDNode *node) |
| virtual void | zeroTorqueControlOffTree (taoDNode *node) |
| void | resetParamTree (taoDNode *node) |
| taoNodeRoot * | root () |
| taoJCParam * | jcpGlobal () |
| special taoJCParam for the global control parameters | |
| deInt & | doDynamicControl () |
| turns dynamics control on/off | |
| deInt & | includeG () |
| turns gravity compensation on/off | |
| taoControlType & | controlLawType () |
| control law type such as PD law | |
This provides a joint space dynamics controller.
_jcp->_kp will change the global position gain.
|
|
|
|
|
|
|
|
Implements taoControl. |
|
|
control law type such as PD law
|
|
|
|
|
|
Implements taoControl. |
|
|
turns dynamics control on/off
|
|
|
Implements taoControl. |
|
|
turns gravity compensation on/off
|
|
|
special taoJCParam for the global control parameters
|
|
|
|
|
|
Implements taoControl. |
|
|
|
|
|
|
|
||||||||||||||||
|
This methode extracts out and sets appropriate joint goal position exiting in
As an example, if Implements taoControl. |
|
|
Implements taoControl. |
|
|
|
 1.4.6-NO
1.4.6-NO