|
OpenSim
OpenSim 3.0
|
|
OpenSim
OpenSim 3.0
|

This class serves as a serializable ForceVelocityCurve, for use in muscle models. More...
#include <ForceVelocityCurve.h>
Public Member Functions | |
| ForceVelocityCurve () | |
Default constructor creates an curve with the default property values, | |
| ForceVelocityCurve (double concentricMinSlope, double isometricMaxSlope, double eccentricMinSlope, double maxEccentricVelocityForceMultiplier, double concentricCurviness, double eccentricCurviness, const std::string &muscleName) | |
| Constructs a C2 continuous force velocity curve. | |
| double | getConcentricMinSlope () const |
| double | getIsometricMaxSlope () const |
| double | getEccentricMinSlope () const |
| double | getMaxEccentricVelocityForceMultiplier () const |
| double | getConcentricCurviness () const |
| double | getEccentricCurviness () const |
| void | setConcentricMinSlope (double aConcentricMinSlope) |
| void | setIsometricMaxSlope (double aIsometricMaxSlope) |
| void | setEccentricMinSlope (double aEccentricMinSlope) |
| void | setMaxEccentricVelocityForceMultiplier (double aMaxForceMultiplier) |
| void | setConcentricCurviness (double aConcentricCurviness) |
| void | setEccentricCurviness (double aEccentricCurviness) |
| double | calcValue (double normFiberVelocity) const |
| Calculates the value of the curve evaluated at 'normFiberVelocity'. | |
| double | calcDerivative (double normFiberVelocity, int order) const |
| Calculates the derivative of the force-velocity multiplier w.r.t. | |
| SimTK::Vec2 | getCurveDomain () const |
| This function returns a SimTK::Vec2 that contains in its 0th element the lowest value of the curve domain, and in its 1st element the highest value in the curve domain of the curve. | |
| void | printMuscleCurveToCSVFile (const std::string &path) const |
| This function will generate a csv file with a name that matches the curve name (e.g. | |
Property declarations | |
These are the serializable properties associated with this class. | |
| OpenSim_DECLARE_PROPERTY (min_concentric_slope, double,"curve slope at the maximum normalized ""concentric contraction velocity (-1)") | |
| OpenSim_DECLARE_PROPERTY (isometric_slope, double,"curve slope at isometric (normalized fiber velocity of 0)") | |
| OpenSim_DECLARE_PROPERTY (min_eccentric_slope, double,"curve slope at the maximum normalized ""eccentric contraction velocity (1)") | |
| OpenSim_DECLARE_PROPERTY (max_eccentric_velocity_force_multiplier, double,"curve value at the maximum normalized ""eccentric contraction velocity") | |
| OpenSim_DECLARE_PROPERTY (concentric_curviness, double,"concentric curve bend, from ""linear to maximum bend (0-1)") | |
| OpenSim_DECLARE_PROPERTY (eccentric_curviness, double,"eccentric curve bend, from ""linear to maximum bend (0-1)") | |
 Public Member Functions inherited from OpenSim::ModelComponent Public Member Functions inherited from OpenSim::ModelComponent | |
| ModelComponent () | |
| Default constructor. | |
| ModelComponent (const std::string &aFileName, bool aUpdateFromXMLNode=true) SWIG_DECLARE_EXCEPTION | |
| Construct ModelComponent from an XML file. | |
| ModelComponent (SimTK::Xml::Element &aNode) | |
| Construct ModelComponent from a specific node in an XML document. | |
| ModelComponent (const ModelComponent &source) | |
Construct ModelComponent with its contents copied from another ModelComponent; this is a deep copy so nothing is shared with the source after the copy. | |
| virtual | ~ModelComponent () |
| Destructor is virtual to allow concrete model component cleanup. | |
| ModelComponent & | operator= (const ModelComponent &aModelComponent) |
| Assignment operator to copy contents of an existing component. | |
| const Model & | getModel () const |
| Get a const reference to the Model this component is part of. | |
| Model & | updModel () |
| Get a modifiable reference to the Model this component is part of. | |
| virtual void | updateDisplayer (const SimTK::State &s) |
| In case the ModelComponent has a visual representation (VisualObject), override this method to update it. | |
| virtual int | getNumStateVariables () const |
| Get the number of "Continuous" state variables maintained by the ModelComponent and its specified subcomponents. | |
| virtual Array< std::string > | getStateVariableNames () const |
| Get the names of "continuous" state variables maintained by the ModelComponent and its subcomponents. | |
| virtual SimTK::SystemYIndex | getStateVariableSystemIndex (const std::string &stateVariableName) const |
| Get the System Index of a state variable allocated by this ModelComponent. | |
| int | getModelingOption (const SimTK::State &state, const std::string &name) const |
| Get a ModelingOption flag for this ModelComponent by name. | |
| void | setModelingOption (SimTK::State &state, const std::string &name, int flag) const |
| Set the value of a ModelingOption flag for this ModelComponent. | |
| double | getStateVariable (const SimTK::State &state, const std::string &name) const |
| Get the value of a state variable allocated by this ModelComponent. | |
| void | setStateVariable (SimTK::State &state, const std::string &name, double value) const |
| Set the value of a state variable allocated by this ModelComponent by name. | |
| double | getDiscreteVariable (const SimTK::State &state, const std::string &name) const |
| Get the value of a discrete variable allocated by this ModelComponent by name. | |
| void | setDiscreteVariable (SimTK::State &state, const std::string &name, double value) const |
| Set the value of a discrete variable allocated by this ModelComponent by name. | |
| template<typename T > | |
| const T & | getCacheVariable (const SimTK::State &state, const std::string &name) const |
| Get the value of a cache variable allocated by this ModelComponent by name. | |
| template<typename T > | |
| T & | updCacheVariable (const SimTK::State &state, const std::string &name) const |
| Obtain a writable cache variable value allocated by this ModelComponent by name. | |
| void | markCacheVariableValid (const SimTK::State &state, const std::string &name) const |
| After updating a cache variable value allocated by this ModelComponent, you can mark its value as valid, which will not change until the realization stage falls below the minimum set at the time the cache variable was created. | |
| void | markCacheVariableInvalid (const SimTK::State &state, const std::string &name) const |
| Mark a cache variable value allocated by this ModelComponent as invalid. | |
| bool | isCacheVariableValid (const SimTK::State &state, const std::string &name) const |
| Enables the to monitor the validity of the cache variable value using the returned flag. | |
| template<typename T > | |
| void | setCacheVariable (const SimTK::State &state, const std::string &name, T &value) const |
| Set cache variable value allocated by this ModelComponent by name. | |
| Public Member Functions inherited from OpenSim::Object | |
| virtual | ~Object () |
| Virtual destructor for cleanup. | |
| virtual Object * | clone () const =0 |
Create a new heap-allocated copy of the concrete object to which this | |
| virtual const std::string & | getConcreteClassName () const =0 |
Returns the class name of the concrete %Object-derived class of the | |
| virtual const VisibleObject * | getDisplayer () const |
| Methods to support making the object displayable in the GUI or Visualizer Implemented only in few objects. | |
| virtual VisibleObject * | updDisplayer () |
| get Non const pointer to VisibleObject | |
| bool | isEqualTo (const Object &aObject) const |
| Equality operator wrapper for use from languages not supporting operator overloading. | |
| Object & | operator= (const Object &aObject) |
Copy assignment copies he base class fields, including the | |
| virtual bool | operator== (const Object &aObject) const |
| Determine if two objects are equal. | |
| virtual bool | operator< (const Object &aObject) const |
Provide an ordering for objects so they can be put in sorted | |
| void | setName (const std::string &name) |
| Set the name of the Object. | |
| const std::string & | getName () const |
| Get the name of this Object. | |
| void | setDescription (const std::string &description) |
| Set description, a one-liner summary. | |
| const std::string & | getDescription () const |
| Get description, a one-liner summary. | |
| const std::string & | getAuthors () const |
| Get Authors of this Object. | |
| void | setAuthors (const std::string &authors) |
| Set Authors of this object, call this method in your constructor if needed. | |
| const std::string & | getReferences () const |
| Get references or publications to cite if using this object. | |
| void | setReferences (const std::string &references) |
| Set references or publications to cite if using this object. | |
| int | getNumProperties () const |
| Determine how many properties are stored with this Object. | |
| const AbstractProperty & | getPropertyByIndex (int propertyIndex) const |
Get a const reference to a property by its index number, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByIndex (int propertyIndex) |
Get a writable reference to a property by its index number, returned as an AbstractProperty. | |
| bool | hasProperty (const std::string &name) const |
Return true if this %Object has a property of any type with the | |
| const AbstractProperty & | getPropertyByName (const std::string &name) const |
Get a const reference to a property by its name, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByName (const std::string &name) |
Get a writable reference to a property by its name, returned as an AbstractProperty. | |
| template<class T > | |
| bool | hasProperty () const |
Return true if this %Object contains an unnamed, one-object property | |
| template<class T > | |
| const Property< T > & | getProperty (const PropertyIndex &index) const |
Get property of known type Property\<T> as a const reference; | |
| template<class T > | |
| Property< T > & | updProperty (const PropertyIndex &index) |
Get property of known type Property\<T> as a writable reference; | |
| void | setObjectIsUpToDateWithProperties () |
When an object is initialized using the current values of its properties, it can set a flag indicating that it is up to date. | |
| bool | isObjectUpToDateWithProperties () const |
Returns \c true if any property's value has changed since the last time setObjectIsUpToDateWithProperties() was called. | |
| void | readObjectFromXMLNodeOrFile (SimTK::Xml::Element &objectElement, int versionNumber) |
| We're given an XML element from which we are to populate this Object. | |
| virtual void | updateFromXMLNode (SimTK::Xml::Element &objectElement, int versionNumber) |
| Use this method to deserialize an object from a SimTK::Xml::Element. | |
| virtual void | updateXMLNode (SimTK::Xml::Element &parent) |
| Serialize this object into the XML node that represents it. | |
| bool | getInlined () const |
Inlined means an in-memory Object that is not associated with an XMLDocument. | |
| void | setInlined (bool aInlined, const std::string &aFileName="") |
Mark this as inlined or not and optionally provide a file name to associate with the new XMLDocument for the non-inline case. | |
| std::string | getDocumentFileName () const |
If there is a document associated with this object then return the | |
| void | setAllPropertiesUseDefault (bool aUseDefault) |
| bool | print (const std::string &fileName) |
Write this %Object into an XML file of the given name; conventionally | |
| std::string | dump (bool dumpName=false) |
| dump the XML representation of this Object into an std::string and return it. | |
| void | clearObjectIsUpToDateWithProperties () |
For testing or debugging purposes, manually clear the "object is up to | |
| virtual bool | isA (const char *type) const |
The default implementation returns true only if the supplied string is "Object"; each Object-derived class overrides this to match its own class name. | |
| const std::string & | toString () const |
Wrapper to be used on Java side to display objects in tree; this returns | |
| PropertySet & | getPropertySet () |
OBSOLETE: Get a reference to the PropertySet maintained by the | |
| const PropertySet & | getPropertySet () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from OpenSim::Object | |
| static void | registerType (const Object &defaultObject) |
Register an instance of a class; if the class is already registered it | |
| static void | renameType (const std::string &oldTypeName, const std::string &newTypeName) |
Support versioning by associating the current %Object type with an | |
| static const Object * | getDefaultInstanceOfType (const std::string &concreteClassName) |
Return a pointer to the default instance of the registered (concrete) Object whose class name is given, or NULL if the type is not registered. | |
| template<class T > | |
| static bool | isObjectTypeDerivedFrom (const std::string &concreteClassName) |
Return true if the given concrete object type represents a subclass of the template object type T, and thus could be referenced with a T*. | |
| static Object * | newInstanceOfType (const std::string &concreteClassName) |
Create a new instance of the concrete %Object type whose class name is | |
| static void | getRegisteredTypenames (Array< std::string > &typeNames) |
| Retrieve all the typenames registered so far. | |
| template<class T > | |
| static void | getRegisteredObjectsOfGivenType (ArrayPtrs< T > &rArray) |
Return an array of pointers to the default instances of all registered (concrete) Object types that derive from a given Object-derived type that does not have to be concrete. | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &classNameDotPropertyName) |
Dump formatted property information to a given output stream, useful | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &className, const std::string &propertyName) |
Same as the other signature but the class name and property name are | |
| static Object * | makeObjectFromFile (const std::string &fileName) |
Create an %OpenSim object whose type is based on the tag at the root | |
| static const std::string & | getClassName () |
| Return the name of this class as a string; i.e., "Object". | |
| static void | setSerializeAllDefaults (bool shouldSerializeDefaults) |
Static function to control whether all registered objects and their properties are written to the defaults section of output files rather than only those values for which the default was explicitly overwritten when read in from an input file or set programmatically. | |
| static bool | getSerializeAllDefaults () |
| Report the value of the "serialize all defaults" flag. | |
| static bool | isKindOf (const char *type) |
Returns true if the passed-in string is "Object"; each %Object-derived | |
| static void | setDebugLevel (int newLevel) |
| Set the debug level to get verbose output. | |
| static int | getDebugLevel () |
| Get current setting of debug level. | |
| static Object * | SafeCopy (const Object *aObject) |
Use the clone() method to duplicate the given object unless the pointer | |
| static void | RegisterType (const Object &defaultObject) |
| OBSOLETE alternate name for registerType(). | |
| static void | RenameType (const std::string &oldName, const std::string &newName) |
| OBSOLETE alternate name for renameType(). | |
| Static Public Attributes inherited from OpenSim::Object | |
| static const std::string | DEFAULT_NAME |
| Name used for default objects when they are serialized. | |
| Protected Member Functions inherited from OpenSim::ModelComponent | |
| virtual void | connectToModel (Model &model) |
Perform any necessary initializations required to connect the component into the Model, and check for error conditions. | |
| virtual void | addToSystem (SimTK::MultibodySystem &system) const |
Add appropriate Simbody elements (if needed) to the System corresponding to this component and specify needed state resources. | |
| virtual void | initStateFromProperties (SimTK::State &state) const |
Transfer property values or other state-independent initial values into this component's state variables in the passed-in state argument. | |
| virtual void | setPropertiesFromState (const SimTK::State &state) |
Update this component's property values to match the specified State, if the component has created any state variable that is intended to correspond to a property. | |
| virtual SimTK::Vector | computeStateVariableDerivatives (const SimTK::State &s) const |
If a model component has allocated any continuous state variables using the addStateVariable() method, then computeStateVariableDerivatives() must be implemented to provide time derivatives for those states. | |
| virtual void | generateDecorations (bool fixed, const ModelDisplayHints &hints, const SimTK::State &state, SimTK::Array_< SimTK::DecorativeGeometry > &appendToThis) const |
Optional method for generating arbitrary display geometry that reflects | |
| void | includeAsSubComponent (ModelComponent *aComponent) |
| Include another ModelComponent as a Subcomponent of this ModelComponent. | |
| void | addModelingOption (const std::string &optionName, int maxFlagValue) const |
Add a modeling option (integer flag stored in the State) for use by this ModelComponent. | |
| void | addStateVariable (const std::string &stateVariableName, SimTK::Stage invalidatesStage=SimTK::Stage::Dynamics) const |
Add a continuous system state variable belonging to this ModelComponent, | |
| void | addDiscreteVariable (const std::string &discreteVariableName, SimTK::Stage invalidatesStage) const |
Add a system discrete variable belonging to this ModelComponent, give it a name by which it can be referenced, and declare the lowest Stage that should be invalidated if this variable's value is changed. | |
| template<class T > | |
| void | addCacheVariable (const std::string &cacheVariableName, const T &variablePrototype, SimTK::Stage dependsOnStage) const |
Add a state cache entry belonging to this ModelComponent to hold calculated values that must be automatically invalidated when certain state values change. | |
| const int | getStateIndex (const std::string &name) const |
| Get the index of a ModelComponent's continuous state variable in the Subsystem for allocations. | |
| const SimTK::DiscreteVariableIndex | getDiscreteVariableIndex (const std::string &name) const |
| Get the index of a ModelComponent's discrete variable in the Subsystem for allocations. | |
| const SimTK::CacheEntryIndex | getCacheVariableIndex (const std::string &name) const |
| Get the index of a ModelComponent's cache variable in the Subsystem for allocations. | |
| Protected Attributes inherited from OpenSim::ModelComponent | |
| Model * | _model |
| The model this component belongs to. | |
| Related Functions inherited from OpenSim::Object | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any non-templatized, concrete class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT(ConcreteClass, SuperClass) |
Macro to be included as the first line of the class declaration for any still-abstract class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, concrete class that derives from OpenSim::Object, like Set<T>. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT_T(ConcreteClass, TArg, SuperClass) |
Macro to be included as the first line of the class declaration for any templatized, still-abstract class that derives from OpenSim::Object. | |
This class serves as a serializable ForceVelocityCurve, for use in muscle models.
| OpenSim::ForceVelocityCurve::ForceVelocityCurve | ( | ) |
Default constructor creates an curve with the default property values,
and assigns it a default name
| OpenSim::ForceVelocityCurve::ForceVelocityCurve | ( | double | concentricMinSlope, |
| double | isometricMaxSlope, | ||
| double | eccentricMinSlope, | ||
| double | maxEccentricVelocityForceMultiplier, | ||
| double | concentricCurviness, | ||
| double | eccentricCurviness, | ||
| const std::string & | muscleName | ||
| ) |
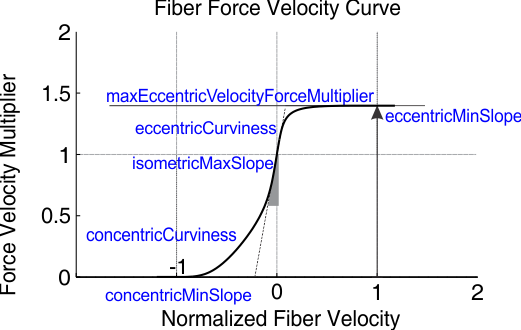
Constructs a C2 continuous force velocity curve.
The force velocity curve requries 6 different properties and a name in order to construct a curve:
| concentricMinSlope | The slope of the force velocity curve at a normalized (w.r.t. vmax * optimal fiber length) contraction velocity of -1, which is also the minimum slope value the concentric side of the force velocity curve achieves. A physiologically accurate value for this paramter is 0, though values greater than 0 are necessary when this curve is used in the context of an equilibrium muscle model because an equilibrium muscle model requires that this curve be invertible (this curve is not invertible when it has a minConcentricSlope of 0). |
| isometricMaxSlope | The slope of the force velocity curve at a normalized (w.r.t. vmax * optimal fiber length) contraction velocity of 0, which is also the maximum slope achieved by the force velocity curve. A physiologically accurate value for this parameter is 5 according to Leiber's text book (pp 55), which is the default value. Although this parameter can be changed, it must be positive and greater than max( (maxEccentricMultiplier-1)/1, 1). The value of this parameter also affects how much the eccentric and concentric curves can be bent by the 'eccentricCurviness', and 'concentricCurviness' parameters, as it places an upper limit on the maximum slope of the force velocity curve. |
| eccentricMinSlope | The slope of the force velocity curve at a normalized (w.r.t. vmax * optimal fiber length) contraction velocity of 1, which is also the minimum slope the eccentric side of the force velocity curve achieves. The normalized fiber length where the descending limb transitions to the minimum value and has a first and second derivative of 0. |
| maxEccentricVelocityForceMultiplier | The value of the force velocity curve, force velocity multiplier, at the maximum eccentric contraction velocity. Physiologically acccurate values for this parameter range between 1.1 and 1.8, and may vary from subject to subject. |
| concentricCurviness | A dimensionless parameter between [0-1] that controls how the concentric curve is drawn: 0 will create a curve that is very close to a straight line segment (like a fast twitch fiber) while a value of 1 will create a curve that smoothly fills the corner formed by the linear extrapolation of 'concentricMinSlope' and 'isometricMaxSlope', as shown in the figure. Depending on how deep the corner formed by the linear extrapolation of 'concentricMinSlope' and 'isometricMaxSlope' is, a low value of 'concentricCurviness' will achieve a concentric curve consistent with a slow twitch fiber. |
| eccentricCurviness | A dimensionless parameter between [0-1] that controls how the eccentric curve is drawn: 0 will create a curve that is very close to a straight line segment while a value of 1 will create a curve that smoothly fills the corner formed by the linear extrapolation of 'isometricMaxSlope' and 'eccentricMinSlope', as shown in the figure. |
| muscleName | The name of the muscle this curve belongs to. This name is used to create the name of this curve, which is formed simply by appending "_ForceVelocityCurve" to the string in muscleName. This name is used for making intelligible error messages and also for naming the XML version of this curve when it is serialized. |
References:
Leiber, R.L (2010). Skeletal Muscle Structure, Function and
Plasticity: The Physiological Basis of Rehabilitiation
- Third Edition. Baltimore, WD: Lippincott Williams & Wilkins.Conditions:
1) 0 <= concentricMinSlope < 1
2a) 1 < isometricMaxSlope
2b) (maxEccentricVelocityForceMultiplier-1)/1 < isometricMaxSlope
3) 0 <= eccentricMinSlope < (maxEccentricVelocityForceMultiplier-1)/1
4) 1 < maxEccentricVelocityForceMultiplier
5) 0 <= concentricCurviness <= 1
6) 0 <= eccentricCurviness <= 1Computational Costs
~8,200 flops
Default Parameter Values
concentricMinSlope ................... = 0.1
isometricMaxSlope ................... = 5
eccentricMinSlope ................... = 0.1
maxEccentricVelocityForceMultiplier... = 1.8
concentricCurviness .................. = 0.1
eccentricCurviness .................. = 0.75Example
| double OpenSim::ForceVelocityCurve::calcDerivative | ( | double | normFiberVelocity, |
| int | order | ||
| ) | const |
Calculates the derivative of the force-velocity multiplier w.r.t.
normalized fiber velocity. Note that if the curve is out of date it is rebuilt (at a cost of ~20,500 flops).
| normFiberVelocity | : the normalized velocity of the muscle fiber (fiber_velocity (m/s) / (optimal_fiber_length (m) * max_lengths_sec (1/s)) |
| order | : the order of the derivative. Only values of 0,1 and 2 are acceptable. |
Computational Costs
x in curve domain : ~391 flops
x in linear section: ~2 flops
| double OpenSim::ForceVelocityCurve::calcValue | ( | double | normFiberVelocity | ) | const |
Calculates the value of the curve evaluated at 'normFiberVelocity'.
Note that if the curve is out of date it is rebuilt (at a cost of ~20,500 flops).
| normFiberVelocity | : the normalized velocity of the muscle fiber (fiber_velocity (m/s) / (optimal_fiber_length (m) * max_lengths_sec (1/s)) |
Computational Costs
x in curve domain : ~282 flops
x in linear section: ~5 flops
| double OpenSim::ForceVelocityCurve::getConcentricCurviness | ( | ) | const |
| double OpenSim::ForceVelocityCurve::getConcentricMinSlope | ( | ) | const |
| SimTK::Vec2 OpenSim::ForceVelocityCurve::getCurveDomain | ( | ) | const |
This function returns a SimTK::Vec2 that contains in its 0th element the lowest value of the curve domain, and in its 1st element the highest value in the curve domain of the curve.
Outside of this domain the curve is approximated using linear extrapolation. Note that if the curve is out of date is rebuilt (which will cost ~20,500 flops).
| double OpenSim::ForceVelocityCurve::getEccentricCurviness | ( | ) | const |
| double OpenSim::ForceVelocityCurve::getEccentricMinSlope | ( | ) | const |
| double OpenSim::ForceVelocityCurve::getIsometricMaxSlope | ( | ) | const |
| double OpenSim::ForceVelocityCurve::getMaxEccentricVelocityForceMultiplier | ( | ) | const |
| OpenSim::ForceVelocityCurve::OpenSim_DECLARE_PROPERTY | ( | min_concentric_slope | , |
| double | , | ||
| "curve slope at the maximum normalized ""concentric contraction velocity (-1)" | |||
| ) |
| OpenSim::ForceVelocityCurve::OpenSim_DECLARE_PROPERTY | ( | isometric_slope | , |
| double | , | ||
| "curve slope at isometric (normalized fiber velocity of 0)" | |||
| ) |
| OpenSim::ForceVelocityCurve::OpenSim_DECLARE_PROPERTY | ( | min_eccentric_slope | , |
| double | , | ||
| "curve slope at the maximum normalized ""eccentric contraction velocity (1)" | |||
| ) |
| OpenSim::ForceVelocityCurve::OpenSim_DECLARE_PROPERTY | ( | max_eccentric_velocity_force_multiplier | , |
| double | , | ||
| "curve value at the maximum normalized ""eccentric contraction velocity" | |||
| ) |
| OpenSim::ForceVelocityCurve::OpenSim_DECLARE_PROPERTY | ( | concentric_curviness | , |
| double | , | ||
| "concentric curve | bend, | ||
| from""linear to maximum bend(0-1)" | |||
| ) |
| OpenSim::ForceVelocityCurve::OpenSim_DECLARE_PROPERTY | ( | eccentric_curviness | , |
| double | , | ||
| "eccentric curve | bend, | ||
| from""linear to maximum bend(0-1)" | |||
| ) |
| void OpenSim::ForceVelocityCurve::printMuscleCurveToCSVFile | ( | const std::string & | path | ) | const |
This function will generate a csv file with a name that matches the curve name (e.g.
"bicepfemoris_fiberForceVelocityCurve.csv"); Note that if the curve is out of date is rebuilt (which will cost ~20,500 flops).
| path | The full path to the location. Note '/' slashes must be used, and do not put a '/' after the last folder. |
The file will contain the following columns:
Col# 1, 2, 3, 4,
x, y, dy/dx, d2y/dx2,
The curve will be sampled from its linear extrapolation region (the region with normalized fiber velocities < -1), through the curve, out to the other linear extrapolation region (the region with normalized fiber velocities > 1). The width of each linear extrapolation region is 10% of the entire range of x, or 0.1*(x1-x0).
The curve is sampled quite densely: there are 200+20 rows
Computational Costs
~194,800 flops
Example To read the csv file with a header in from Matlab, you need to use csvread set so that it will ignore the header row. This is accomplished by using the extra two numerical arguments for csvread to tell the function to begin reading from the 1st row, and the 0th index (csvread is 0 indexed). This is necessary to skip reading in the text header
data=csvread('bicepfemoris_fiberForceVelocityCurve.csv',1,0);
| void OpenSim::ForceVelocityCurve::setConcentricCurviness | ( | double | aConcentricCurviness | ) |
| aConcentricCurviness | The value of the curviness of the concentric curve, where 0 represents a nearly straight line segment, and 1 represents a curve with the maximum bend possible given the concentricMinSlope, and the isometricMaxSlope. |
| void OpenSim::ForceVelocityCurve::setConcentricMinSlope | ( | double | aConcentricMinSlope | ) |
| aConcentricMinSlope | the slope of the force velocity curve at the maximum concentric contraction velocity (1). |
| void OpenSim::ForceVelocityCurve::setEccentricCurviness | ( | double | aEccentricCurviness | ) |
| aEccentricCurviness | The value of the curviness of the eccentric curve, where 0 represents a nearly straight line segment, and 1 represents a curve with the maximum bend possible given the eccentricMinSlope, and the isometricMaxSlope. |
| void OpenSim::ForceVelocityCurve::setEccentricMinSlope | ( | double | aEccentricMinSlope | ) |
| aEccentricMinSlope | the slope of the force velocity curve at the maximum eccentric (lengthening) contraction velocity (1). |
| void OpenSim::ForceVelocityCurve::setIsometricMaxSlope | ( | double | aIsometricMaxSlope | ) |
| aIsometricMaxSlope | the slope of the force velocity curve at a contraction velocity of 0. |
| void OpenSim::ForceVelocityCurve::setMaxEccentricVelocityForceMultiplier | ( | double | aMaxForceMultiplier | ) |
| aMaxForceMultiplier | the value of the force velocity curve, or the value of the force velocity multiplier, at the maximum eccentric (lengthening) velocity |
 1.8.1.2
1.8.1.2 
