|
OpenSim
OpenSim 3.1
|
|
OpenSim
OpenSim 3.1
|

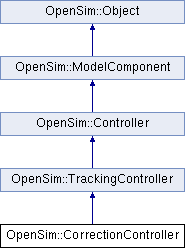
This is a simple feedback controller to be used in generating a forward dynamic simulation. More...
#include <CorrectionController.h>
Public Member Functions | |
| CorrectionController () | |
| CorrectionController (const std::string &aFileName, bool aUpdateFromXMLNode=true) | |
| CorrectionController (const CorrectionController &aController) | |
| virtual | ~CorrectionController () |
| CorrectionController & | operator= (const CorrectionController &aController) |
| Assignment operator. | |
| double | getKp () const |
| void | setKp (double aKp) |
| double | getKv () const |
| void | setKv (double aKv) |
| virtual void | computeControls (const SimTK::State &s, SimTK::Vector &controls) const |
| Controller interface. | |
 Public Member Functions inherited from OpenSim::TrackingController Public Member Functions inherited from OpenSim::TrackingController | |
| TrackingController () | |
| Default constructor. | |
| TrackingController (const TrackingController &TrackingController) | |
| Copy constructor. | |
| virtual | ~TrackingController () |
| Destructor. | |
| TrackingController & | operator= (const TrackingController &TrackingController) |
| Assignment operator. | |
| virtual void | setDesiredStatesStorage (const Storage *aYDesStore) |
| Set this class's pointer to the storage object containing desired model states to point to the storage object passed into this method. | |
| virtual const Storage & | getDesiredStatesStorage () const |
| Public Member Functions inherited from OpenSim::Controller | |
| OpenSim_DECLARE_PROPERTY (isDisabled, bool,"Flag (true or false) indicating whether or not the controller is disabled.") | |
| OpenSim_DECLARE_LIST_PROPERTY (actuator_list, std::string,"The list of model actuators that this controller will control.""The keyword ALL indicates the controller will controll all the acuators in the model") | |
| Controller () | |
| Default constructor. | |
| bool | isDisabled () const |
| Get whether or not this controller is disabled. | |
| void | setDisabled (bool disableFlag) |
| Disable this controller. | |
| void | setActuators (const Set< Actuator > &actuators) |
| replace the current set of actuators with the provided set | |
| void | addActuator (const Actuator &actuator) |
| add to the current set of actuators | |
| const Set< Actuator > & | getActuatorSet () const |
| get a const reference to the current set of actuators | |
| Set< Actuator > & | updActuators () |
| get a writable reference to the set of actuators for this controller | |
| int | getNumControls () const |
Protected Member Functions | |
| void | setupProperties () |
| Connect properties to local pointers. | |
| void | copyData (const CorrectionController &aController) |
| void | connectToModel (Model &model) override |
| Model component interface that permits the controller to be "wired" up to its actuators. | |
| void | addToSystem (SimTK::MultibodySystem &system) const override |
| Model component interface that creates underlying computational components in the SimTK::MultibodySystem. | |
| void | initStateFromProperties (SimTK::State &s) const override |
| Transfer property values or other state-independent initial values into this component's state variables in the passed-in state argument. | |
| Protected Member Functions inherited from OpenSim::TrackingController | |
| void | copyData (const TrackingController &aController) |
| Copy the member variables of the specified controller. | |
| Protected Member Functions inherited from OpenSim::Controller | |
| void | setNumControls (int numControls) |
| Only a Controller can set its number of controls based on its actuators. | |
Protected Attributes | |
| PropertyDbl | _kpProp |
| Gain for position errors. | |
| double & | _kp |
| PropertyDbl | _kvProp |
| Gain for velocity errors. | |
| double & | _kv |
| Storage * | _yDesStore |
| States for the simulation. | |
| Protected Attributes inherited from OpenSim::TrackingController | |
| const Storage * | _desiredStatesStorage |
| storage object containing the desired trajectory | |
| Array< double > * | _trackingTasks |
Additional Inherited Members | |
| Static Public Member Functions inherited from OpenSim::Object | |
| static void | registerType (const Object &defaultObject) |
| Register an instance of a class; if the class is already registered it will be replaced. | |
| static void | renameType (const std::string &oldTypeName, const std::string &newTypeName) |
| Support versioning by associating the current Object type with an old name. | |
| static const Object * | getDefaultInstanceOfType (const std::string &concreteClassName) |
| Return a pointer to the default instance of the registered (concrete) Object whose class name is given, or NULL if the type is not registered. | |
| template<class T > | |
| static bool | isObjectTypeDerivedFrom (const std::string &concreteClassName) |
| Return true if the given concrete object type represents a subclass of the template object type T, and thus could be referenced with a T*. | |
| static Object * | newInstanceOfType (const std::string &concreteClassName) |
| Create a new instance of the concrete Object type whose class name is given as concreteClassName. | |
| static void | getRegisteredTypenames (Array< std::string > &typeNames) |
| Retrieve all the typenames registered so far. | |
| template<class T > | |
| static void | getRegisteredObjectsOfGivenType (ArrayPtrs< T > &rArray) |
| Return an array of pointers to the default instances of all registered (concrete) Object types that derive from a given Object-derived type that does not have to be concrete. | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &classNameDotPropertyName) |
| Dump formatted property information to a given output stream, useful for creating a "help" facility for registered objects. | |
| static void | PrintPropertyInfo (std::ostream &os, const std::string &className, const std::string &propertyName) |
| Same as the other signature but the class name and property name are provided as two separate strings. | |
| static Object * | makeObjectFromFile (const std::string &fileName) |
| Create an OpenSim object whose type is based on the tag at the root node of the XML file passed in. | |
| static const std::string & | getClassName () |
| Return the name of this class as a string; i.e., "Object". | |
| static void | setSerializeAllDefaults (bool shouldSerializeDefaults) |
| Static function to control whether all registered objects and their properties are written to the defaults section of output files rather than only those values for which the default was explicitly overwritten when read in from an input file or set programmatically. | |
| static bool | getSerializeAllDefaults () |
| Report the value of the "serialize all defaults" flag. | |
| static bool | isKindOf (const char *type) |
| Returns true if the passed-in string is "Object"; each Object-derived class defines a method of this name for its own class name. | |
| static void | setDebugLevel (int newLevel) |
| Set the debug level to get verbose output. | |
| static int | getDebugLevel () |
| Get current setting of debug level. | |
| static Object * | SafeCopy (const Object *aObject) |
| Use the clone() method to duplicate the given object unless the pointer is null in which case null is returned. | |
| static void | RegisterType (const Object &defaultObject) |
| OBSOLETE alternate name for registerType(). | |
| static void | RenameType (const std::string &oldName, const std::string &newName) |
| OBSOLETE alternate name for renameType(). | |
| Static Public Attributes inherited from OpenSim::Object | |
| static const std::string | DEFAULT_NAME |
| Name used for default objects when they are serialized. | |
| Friends inherited from OpenSim::Controller | |
| Related Functions inherited from OpenSim::Object | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT(ConcreteClass, SuperClass) |
| Macro to be included as the first line of the class declaration for any non-templatized, concrete class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT(ConcreteClass, SuperClass) |
| Macro to be included as the first line of the class declaration for any still-abstract class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT_T(ConcreteClass, TArg, SuperClass) |
| Macro to be included as the first line of the class declaration for any templatized, concrete class that derives from OpenSim::Object, like Set<T>. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT_T(ConcreteClass, TArg, SuperClass) |
| Macro to be included as the first line of the class declaration for any templatized, still-abstract class that derives from OpenSim::Object. | |
This is a simple feedback controller to be used in generating a forward dynamic simulation.
| OpenSim::CorrectionController::CorrectionController | ( | ) |
| OpenSim::CorrectionController::CorrectionController | ( | const std::string & | aFileName, |
| bool | aUpdateFromXMLNode = true |
||
| ) |
| OpenSim::CorrectionController::CorrectionController | ( | const CorrectionController & | aController | ) |
|
virtual |
|
overrideprotectedvirtual |
Model component interface that creates underlying computational components in the SimTK::MultibodySystem.
This includes adding states, creating measures, etc... required by the controller.
Reimplemented from OpenSim::Controller.
|
virtual |
Controller interface.
Implements OpenSim::TrackingController.
|
overrideprotectedvirtual |
Model component interface that permits the controller to be "wired" up to its actuators.
Subclasses can override to perform additional setup.
Reimplemented from OpenSim::Controller.
|
protected |
| double OpenSim::CorrectionController::getKp | ( | ) | const |
| double OpenSim::CorrectionController::getKv | ( | ) | const |
|
overrideprotectedvirtual |
Transfer property values or other state-independent initial values into this component's state variables in the passed-in state argument.
This is called after a SimTK::System and State have been created for the Model (that is, after addToSystem() has been called on all components). You should override this method if your component has properties (serializable values) that can affect initial values for your state variables. You can also perform any other state-independent calculations here that result in state initial conditions.
If you override this method, be sure to invoke the base class method first, using code like this:
| state | The state that will receive the new initial conditions. |
Reimplemented from OpenSim::ModelComponent.
| CorrectionController& OpenSim::CorrectionController::operator= | ( | const CorrectionController & | aController | ) |
Assignment operator.
This method is called automatically whenever a command of the form "controller1 = controller2;" is made, where both controller1 and controller2 are both of type Controller. Although Controller cannot be instantiated directly, a subclass of Controller could implement its own operator= method that calls Controller's operator= method. If the subclass does not implement its own operator= method, then when a command of the form "controller1 = controller2" is made, where both controller1 and controller2 are instants of the subclass, the Controller class's operator= method will be called automatically.
| aController | The controller to be copied. |
| void OpenSim::CorrectionController::setKp | ( | double | aKp | ) |
| void OpenSim::CorrectionController::setKv | ( | double | aKv | ) |
|
protectedvirtual |
Connect properties to local pointers.
Reimplemented from OpenSim::TrackingController.
|
protected |
|
protected |
Gain for position errors.
This property can be specified in a setup file.
|
protected |
|
protected |
Gain for velocity errors.
This property can be specified in a setup file.
|
protected |
States for the simulation.
 1.8.1.2
1.8.1.2 
