|
OpenSim
OpenSim 3.1
|
|
OpenSim
OpenSim 3.1
|

This class serves as a serializable ForceVelocityInverseCurve for use in equilibrium muscle models. More...
#include <ForceVelocityInverseCurve.h>
Public Member Functions | |
| ForceVelocityInverseCurve () | |
| The default constructor creates an inverse force-velocity curve using the default property values and assigns a default name. | |
| ForceVelocityInverseCurve (double concentricSlopeAtVmax, double concentricSlopeNearVmax, double isometricSlope, double eccentricSlopeAtVmax, double eccentricSlopeNearVmax, double maxEccentricVelocityForceMultiplier, double concentricCurviness, double eccentricCurviness) | |
| Constructs an inverse force-velocity curve using the provided parameters and assigns a default name. | |
| double | getConcentricSlopeAtVmax () const |
| double | getConcentricSlopeNearVmax () const |
| double | getIsometricSlope () const |
| double | getEccentricSlopeAtVmax () const |
| double | getEccentricSlopeNearVmax () const |
| double | getMaxEccentricVelocityForceMultiplier () const |
| double | getConcentricCurviness () const |
| double | getEccentricCurviness () const |
| void | setCurveShape (double aConcentricSlopeAtVmax, double aConcentricSlopeNearVmax, double aIsometricSlope, double aEccentricSlopeAtVmax, double aEccentricSlopeNearVmax, double aMaxForceMultiplier) |
| void | setConcentricCurviness (double aConcentricCurviness) |
| void | setEccentricCurviness (double aEccentricCurviness) |
| double | calcValue (const SimTK::Vector &x) const override |
| Implement the generic OpenSim::Function interface. | |
| double | calcValue (double aForceVelocityMultiplier) const |
| Evaluates the inverse force-velocity curve at a force-velocity multiplier value of 'aForceVelocityMultiplier'. | |
| double | calcDerivative (double aForceVelocityMultiplier, int order) const |
| Calculates the derivative of the inverse force-velocity curve with respect to the force-velocity multiplier. | |
| SimTK::Vec2 | getCurveDomain () const |
| Returns a SimTK::Vec2 containing the lower (0th element) and upper (1st element) bounds on the domain of the curve. | |
| void | printMuscleCurveToCSVFile (const std::string &path) |
| Generates a .csv file with a name that matches the curve name (e.g., "bicepsfemoris_ForceVelocityInverseCurve.csv"). | |
| void | ensureCurveUpToDate () |
Property declarations | |
These are the serializable properties associated with this class. | |
| OpenSim_DECLARE_PROPERTY (concentric_slope_at_vmax, double,"Slope of force-velocity curve at the maximum normalized concentric (shortening) velocity (normalized velocity of -1)") | |
| OpenSim_DECLARE_PROPERTY (concentric_slope_near_vmax, double,"Slope of force-velocity curve just before reaching concentric_slope_at_vmax") | |
| OpenSim_DECLARE_PROPERTY (isometric_slope, double,"Slope of force-velocity curve at isometric (normalized velocity of 0)") | |
| OpenSim_DECLARE_PROPERTY (eccentric_slope_at_vmax, double,"Slope of force-velocity curve at the maximum normalized eccentric (lengthening) velocity (normalized velocity of 1)") | |
| OpenSim_DECLARE_PROPERTY (eccentric_slope_near_vmax, double,"Slope of force-velocity curve just before reaching eccentric_slope_at_vmax") | |
| OpenSim_DECLARE_PROPERTY (max_eccentric_velocity_force_multiplier, double,"Value of force-velocity curve at the maximum normalized eccentric contraction velocity") | |
| OpenSim_DECLARE_PROPERTY (concentric_curviness, double,"Shape of concentric branch of force-velocity curve, from linear (0) to maximal curve (1)") | |
| OpenSim_DECLARE_PROPERTY (eccentric_curviness, double,"Shape of eccentric branch of force-velocity curve, from linear (0) to maximal curve (1)") | |
 Public Member Functions inherited from OpenSim::Function Public Member Functions inherited from OpenSim::Function | |
| Function () | |
| Function (const Function &aFunction) | |
| virtual | ~Function () |
| virtual void | init (Function *aFunction) |
| Function & | operator= (const Function &aFunction) |
| virtual double | calcDerivative (const std::vector< int > &derivComponents, const SimTK::Vector &x) const |
| Calculate a partial derivative of this function at a particular point. | |
| virtual int | getArgumentSize () const |
| Get the number of components expected in the input vector. | |
| virtual int | getMaxDerivativeOrder () const |
| Get the maximum derivative order this Function object can calculate. | |
| virtual SimTK::Function * | createSimTKFunction () const =0 |
| Public Member Functions inherited from OpenSim::Object | |
| virtual | ~Object () |
| Virtual destructor for cleanup. | |
| virtual Object * | clone () const =0 |
| Create a new heap-allocated copy of the concrete object to which this Object refers. | |
| virtual const std::string & | getConcreteClassName () const =0 |
| Returns the class name of the concrete Object-derived class of the actual object referenced by this Object, as a string. | |
| virtual const VisibleObject * | getDisplayer () const |
| Methods to support making the object displayable in the GUI or Visualizer Implemented only in few objects. | |
| virtual VisibleObject * | updDisplayer () |
| get Non const pointer to VisibleObject | |
| bool | isEqualTo (const Object &aObject) const |
| Equality operator wrapper for use from languages not supporting operator overloading. | |
| Object & | operator= (const Object &aObject) |
| Copy assignment copies he base class fields, including the properties. | |
| virtual bool | operator== (const Object &aObject) const |
| Determine if two objects are equal. | |
| virtual bool | operator< (const Object &aObject) const |
| Provide an ordering for objects so they can be put in sorted containers. | |
| void | setName (const std::string &name) |
| Set the name of the Object. | |
| const std::string & | getName () const |
| Get the name of this Object. | |
| void | setDescription (const std::string &description) |
| Set description, a one-liner summary. | |
| const std::string & | getDescription () const |
| Get description, a one-liner summary. | |
| const std::string & | getAuthors () const |
| Get Authors of this Object. | |
| void | setAuthors (const std::string &authors) |
| Set Authors of this object, call this method in your constructor if needed. | |
| const std::string & | getReferences () const |
| Get references or publications to cite if using this object. | |
| void | setReferences (const std::string &references) |
| Set references or publications to cite if using this object. | |
| int | getNumProperties () const |
| Determine how many properties are stored with this Object. | |
| const AbstractProperty & | getPropertyByIndex (int propertyIndex) const |
| Get a const reference to a property by its index number, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByIndex (int propertyIndex) |
| Get a writable reference to a property by its index number, returned as an AbstractProperty. | |
| bool | hasProperty (const std::string &name) const |
| Return true if this Object has a property of any type with the given name, which must not be empty. | |
| const AbstractProperty & | getPropertyByName (const std::string &name) const |
| Get a const reference to a property by its name, returned as an AbstractProperty. | |
| AbstractProperty & | updPropertyByName (const std::string &name) |
| Get a writable reference to a property by its name, returned as an AbstractProperty. | |
| template<class T > | |
| bool | hasProperty () const |
| Return true if this Object contains an unnamed, one-object property that contains objects of the given template type T. | |
| template<class T > | |
| const Property< T > & | getProperty (const PropertyIndex &index) const |
| Get property of known type Property<T> as a const reference; the property must be present and have the right type. | |
| template<class T > | |
| Property< T > & | updProperty (const PropertyIndex &index) |
| Get property of known type Property<T> as a writable reference; the property must be present and have the right type. | |
| void | setObjectIsUpToDateWithProperties () |
| When an object is initialized using the current values of its properties, it can set a flag indicating that it is up to date. | |
| bool | isObjectUpToDateWithProperties () const |
Returns true if no property's value has changed since the last time setObjectIsUpToDateWithProperties() was called. | |
| void | readObjectFromXMLNodeOrFile (SimTK::Xml::Element &objectElement, int versionNumber) |
| We're given an XML element from which we are to populate this Object. | |
| virtual void | updateFromXMLNode (SimTK::Xml::Element &objectElement, int versionNumber) |
| Use this method to deserialize an object from a SimTK::Xml::Element. | |
| virtual void | updateXMLNode (SimTK::Xml::Element &parent) |
| Serialize this object into the XML node that represents it. | |
| bool | getInlined () const |
| Inlined means an in-memory Object that is not associated with an XMLDocument. | |
| void | setInlined (bool aInlined, const std::string &aFileName="") |
| Mark this as inlined or not and optionally provide a file name to associate with the new XMLDocument for the non-inline case. | |
| std::string | getDocumentFileName () const |
| If there is a document associated with this object then return the file name maintained by the document. | |
| void | setAllPropertiesUseDefault (bool aUseDefault) |
| bool | print (const std::string &fileName) |
| Write this Object into an XML file of the given name; conventionally the suffix to use is ".osim". | |
| std::string | dump (bool dumpName=false) |
| dump the XML representation of this Object into an std::string and return it. | |
| void | clearObjectIsUpToDateWithProperties () |
| For testing or debugging purposes, manually clear the "object is up to
date with respect to properties" flag. | |
| virtual bool | isA (const char *type) const |
| The default implementation returns true only if the supplied string is "Object"; each Object-derived class overrides this to match its own class name. | |
| const std::string & | toString () const |
| Wrapper to be used on Java side to display objects in tree; this returns just the object's name. | |
| PropertySet & | getPropertySet () |
| OBSOLETE: Get a reference to the PropertySet maintained by the Object. | |
| const PropertySet & | getPropertySet () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from OpenSim::Function | |
| static Function * | makeFunctionOfType (Function *aFunction, const std::string &aNewTypeName) |
| Static Public Attributes inherited from OpenSim::Object | |
| static const std::string | DEFAULT_NAME |
| Name used for default objects when they are serialized. | |
| Protected Member Functions inherited from OpenSim::Function | |
| void | resetFunction () |
| This should be called whenever this object has been modified. | |
| Protected Attributes inherited from OpenSim::Function | |
| SimTK::Function * | _function |
| Related Functions inherited from OpenSim::Object | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT(ConcreteClass, SuperClass) |
| Macro to be included as the first line of the class declaration for any non-templatized, concrete class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT(ConcreteClass, SuperClass) |
| Macro to be included as the first line of the class declaration for any still-abstract class that derives from OpenSim::Object. | |
| #define | OpenSim_DECLARE_CONCRETE_OBJECT_T(ConcreteClass, TArg, SuperClass) |
| Macro to be included as the first line of the class declaration for any templatized, concrete class that derives from OpenSim::Object, like Set<T>. | |
| #define | OpenSim_DECLARE_ABSTRACT_OBJECT_T(ConcreteClass, TArg, SuperClass) |
| Macro to be included as the first line of the class declaration for any templatized, still-abstract class that derives from OpenSim::Object. | |
This class serves as a serializable ForceVelocityInverseCurve for use in equilibrium muscle models.
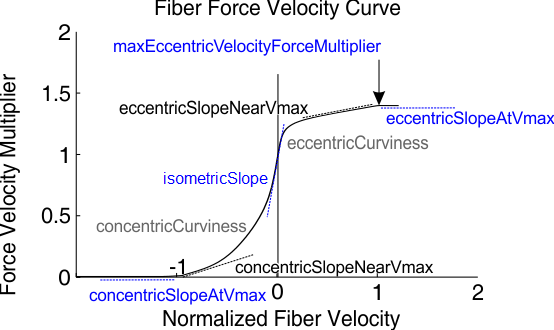
The inverse force-velocity curve is dimensionless: force is normalized to maximum isometric force and velocity is normalized to the maximum muscle contraction velocity (vmax), where vmax is expressed in units of optimal_fiber_lengths per second. Negative normalized velocities correspond to concentric contraction (i.e., shortening). The inverse force-velocity curve is constructed from 8 properties, which are identical to those used to construct the corresponding force-velocity curve. See ForceVelocityCurve for descriptions of these parameters.
| concentricSlopeAtVmax | An exception will be thrown if this parameter is set to 0. |
| concentricSlopeNearVmax | An exception will be thrown if this parameter is set to 0. |
| isometricSlope | |
| eccentricSlopeAtVmax | An exception will be thrown if this parameter is set to 0. |
| eccentricSlopeNearVmax | An exception will be thrown if this parameter is set to 0. |
| maxEccentricVelocityForceMultiplier | |
| concentricCurviness | |
| eccentricCurviness | 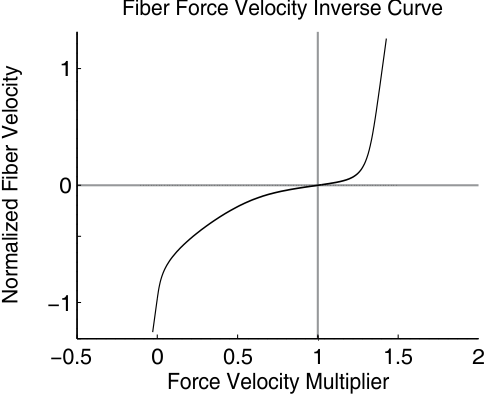
|
Conditions
1a) 0 < concentricSlopeAtVmax < 1 1b) concentricSlopeAtVmax < concentricSlopeNearVmax < 1 2a) 1 < isometricSlope 2b) (maxEccentricVelocityForceMultiplier-1)/1 < isometricSlope 3) 0 < eccentricSlopeAtVmax < (maxEccentricVelocityForceMultiplier-1)/1 4) 1 < maxEccentricVelocityForceMultiplier 5) 0 <= concentricCurviness <= 1 6) 0 <= eccentricCurviness <= 1
Default Parameter Values
concentricSlopeAtVmax .................. 0.1 concentricSlopeNearVmax ................ 0.25 isometricSlope ......................... 5.0 eccentricSlopeAtVmax ................... 0.1 eccentricSlopeNearVmax ................. 0.15 maxEccentricVelocityForceMultiplier .... 1.4 concentricCurviness .................... 0.6 eccentricCurviness ..................... 0.9
Example
Note that this object should be updated through the set methods provided. These set methods will take care of rebuilding the curve correctly. If you modify the properties directly, the curve will not be rebuilt, and upon calling a function like calcValue, calcDerivative, or printCurveToCSVFile, an exception will be thrown because the curve is out-of-date with its properties.
| OpenSim::ForceVelocityInverseCurve::ForceVelocityInverseCurve | ( | ) |
The default constructor creates an inverse force-velocity curve using the default property values and assigns a default name.
| OpenSim::ForceVelocityInverseCurve::ForceVelocityInverseCurve | ( | double | concentricSlopeAtVmax, |
| double | concentricSlopeNearVmax, | ||
| double | isometricSlope, | ||
| double | eccentricSlopeAtVmax, | ||
| double | eccentricSlopeNearVmax, | ||
| double | maxEccentricVelocityForceMultiplier, | ||
| double | concentricCurviness, | ||
| double | eccentricCurviness | ||
| ) |
Constructs an inverse force-velocity curve using the provided parameters and assigns a default name.
| double OpenSim::ForceVelocityInverseCurve::calcDerivative | ( | double | aForceVelocityMultiplier, |
| int | order | ||
| ) | const |
Calculates the derivative of the inverse force-velocity curve with respect to the force-velocity multiplier.
| aForceVelocityMultiplier | The force-velocity multiplier value. |
| order | The order of the derivative. Only values of 0, 1, and 2 are acceptable. |
|
inlineoverridevirtual |
Implement the generic OpenSim::Function interface.
Reimplemented from OpenSim::Function.
| double OpenSim::ForceVelocityInverseCurve::calcValue | ( | double | aForceVelocityMultiplier | ) | const |
Evaluates the inverse force-velocity curve at a force-velocity multiplier value of 'aForceVelocityMultiplier'.
| void OpenSim::ForceVelocityInverseCurve::ensureCurveUpToDate | ( | ) |
| double OpenSim::ForceVelocityInverseCurve::getConcentricCurviness | ( | ) | const |
| double OpenSim::ForceVelocityInverseCurve::getConcentricSlopeAtVmax | ( | ) | const |
| double OpenSim::ForceVelocityInverseCurve::getConcentricSlopeNearVmax | ( | ) | const |
| SimTK::Vec2 OpenSim::ForceVelocityInverseCurve::getCurveDomain | ( | ) | const |
Returns a SimTK::Vec2 containing the lower (0th element) and upper (1st element) bounds on the domain of the curve.
Outside this domain, the curve is approximated using linear extrapolation.
| double OpenSim::ForceVelocityInverseCurve::getEccentricCurviness | ( | ) | const |
| double OpenSim::ForceVelocityInverseCurve::getEccentricSlopeAtVmax | ( | ) | const |
| double OpenSim::ForceVelocityInverseCurve::getEccentricSlopeNearVmax | ( | ) | const |
| double OpenSim::ForceVelocityInverseCurve::getIsometricSlope | ( | ) | const |
| double OpenSim::ForceVelocityInverseCurve::getMaxEccentricVelocityForceMultiplier | ( | ) | const |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | concentric_slope_at_vmax | , |
| double | , | ||
| "Slope of force-velocity curve at the maximum normalized concentric (shortening) velocity (normalized velocity of -1)" | |||
| ) |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | concentric_slope_near_vmax | , |
| double | , | ||
| "Slope of force-velocity curve just before reaching concentric_slope_at_vmax" | |||
| ) |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | isometric_slope | , |
| double | , | ||
| "Slope of force-velocity curve at isometric (normalized velocity of 0)" | |||
| ) |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | eccentric_slope_at_vmax | , |
| double | , | ||
| "Slope of force-velocity curve at the maximum normalized eccentric (lengthening) velocity (normalized velocity of 1)" | |||
| ) |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | eccentric_slope_near_vmax | , |
| double | , | ||
| "Slope of force-velocity curve just before reaching eccentric_slope_at_vmax" | |||
| ) |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | max_eccentric_velocity_force_multiplier | , |
| double | , | ||
| "Value of force-velocity curve at the maximum normalized eccentric contraction velocity" | |||
| ) |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | concentric_curviness | , |
| double | , | ||
| "Shape of concentric branch of force-velocity | curve, | ||
| from linear(0) to maximal curve(1)" | |||
| ) |
| OpenSim::ForceVelocityInverseCurve::OpenSim_DECLARE_PROPERTY | ( | eccentric_curviness | , |
| double | , | ||
| "Shape of eccentric branch of force-velocity | curve, | ||
| from linear(0) to maximal curve(1)" | |||
| ) |
| void OpenSim::ForceVelocityInverseCurve::printMuscleCurveToCSVFile | ( | const std::string & | path | ) |
Generates a .csv file with a name that matches the curve name (e.g., "bicepsfemoris_ForceVelocityInverseCurve.csv").
This function is not const to permit the curve to be rebuilt if it is out-of-date with its properties.
| path | The full destination path. Note that forward slashes ('/') must be used and there should not be a slash after the last folder. |
The file will contain the following data:
column: 1 | 2 | 3 | 4 data: x | y | dy/dx | d2y/dx2
Samples will be taken from the concentric linear extrapolation region (the region with normalized fiber velocities < -1), through the curve, out to the eccentric linear extrapolation region (the region with normalized fiber velocities > 1). The width of each linear extrapolation region is 10% of the curve domain, or 0.1*(x1-x0). The curve is sampled quite densely: the inverse force-velocity .csv file will have 200+20 rows.
Example To read the .csv file into Matlab, you need to set csvread to ignore the header row. Since csvread is 0-indexed, the following example will begin reading the .csv file from the first column of the second row:
data = csvread('bicepsfemoris_ForceVelocityInverseCurve.csv', 1, 0);
| void OpenSim::ForceVelocityInverseCurve::setConcentricCurviness | ( | double | aConcentricCurviness | ) |
| aConcentricCurviness | A dimensionless parameter between 0 and 1 that describes the shape of the concentric branch of the force-velocity curve: a value of 0 indicates that the curve is very close to a straight line segment and a value of 1 indicates a curve that smoothly fills the corner formed by the linear extrapolation of 'concentricSlopeNearVmax' and 'isometricSlope', as shown in the figure in the class description. |
Conditions
0 <= concentricCurviness <= 1
| void OpenSim::ForceVelocityInverseCurve::setCurveShape | ( | double | aConcentricSlopeAtVmax, |
| double | aConcentricSlopeNearVmax, | ||
| double | aIsometricSlope, | ||
| double | aEccentricSlopeAtVmax, | ||
| double | aEccentricSlopeNearVmax, | ||
| double | aMaxForceMultiplier | ||
| ) |
| aConcentricSlopeAtVmax | The slope of the force-velocity curve at a normalized velocity of -1, which is the minimum slope of the concentric side of the force-velocity curve. |
| aConcentricSlopeNearVmax | The slope of the force-velocity curve near the maximum normalized concentric (shortening) contraction velocity (between approximately -0.8 and -1). |
| aIsometricSlope | The slope of the force-velocity curve at a normalized velocity of 0, which is the maximum slope of the force-velocity curve. |
| aEccentricSlopeAtVmax | The slope of the force-velocity curve at a normalized velocity of 1, which is the minimum slope of the eccentric side of the force-velocity curve. |
| aEccentricSlopeNearVmax | The slope of the force-velocity curve near the maximum normalized eccentric (lengthening) contraction velocity (between approximately 0.8 and 1). |
| aMaxForceMultiplier | The value of the force-velocity curve (i.e., the force-velocity multiplier) at the maximum eccentric contraction velocity. |
Conditions
1a) 0 < concentricSlopeAtVmax < 1 1b) concentricSlopeAtVmax < concentricSlopeNearVmax < 1 2a) 1 < isometricSlope 2b) (maxEccentricVelocityForceMultiplier-1)/1 < isometricMaxSlope 3a) 0 < eccentricSlopeAtVmax < (maxEccentricVelocityForceMultiplier-1)/1 3b) eccentricSlopeAtVmax < eccentricSlopeNearVmax < (maxEccentricVelocityForceMultiplier-1)/1 4) 1 < maxEccentricVelocityForceMultiplier
| void OpenSim::ForceVelocityInverseCurve::setEccentricCurviness | ( | double | aEccentricCurviness | ) |
| aEccentricCurviness | A dimensionless parameter between 0 and 1 that describes the shape of the eccentric branch of the force-velocity curve: a value of 0 indicates that the curve is very close to a straight line segment and a value of 1 indicates a curve that smoothly fills the corner formed by the linear extrapolation of 'isometricSlope' and 'eccentricSlopeNearVmax', as shown in the figure in the class description. |
Conditions
0 <= eccentricCurviness <= 1
 1.8.1.2
1.8.1.2 
